RACOON Lab
Zielsetzung
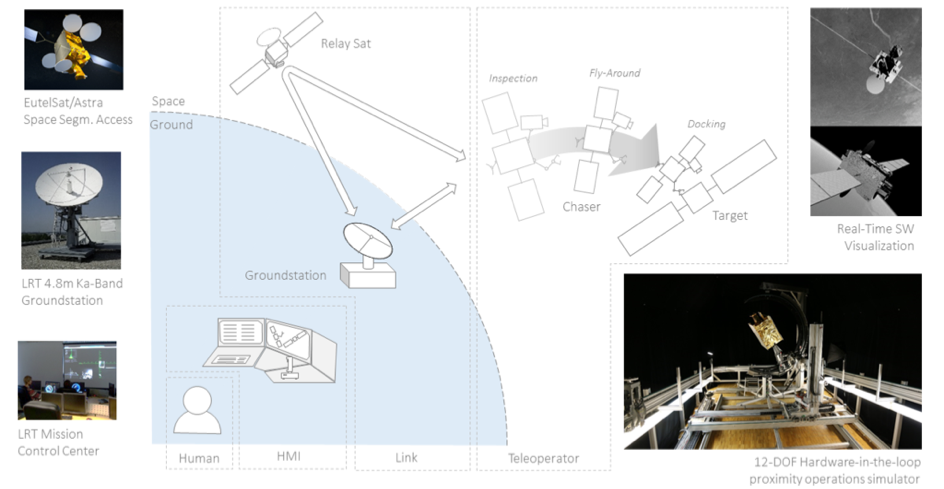
Das RACOON-Lab (Robotic Actuation and On-Orbit Navigation Laboratory) ist ein Simulator for die Wartung von Satelliten und Entfernung von Weltraumschrott. Er ist in der Lage, solche Szenarien mit einem hohen Grad an Realitätsnähe zu simulieren. Das Design basiert auf der Architektur einer teleoperierten Weltraummission, wie aus der Abbildung deutlich wird.
Ein Operator am Boden steuert über eine Funkverbindung ein robotisches System im Orbit, dass über Sensoren und Aktuatoren mit der Umgebung interagieren kann. So können zum Beispiel orbitale Strukturen aufgebaut oder beschädigte Satelliten repariert werden.
Dazu wurde am Lehrstuhl für Raumfahrttechnik eine Simulationsumgebung entwickelt die sowohl Hardware-in-the-Loop Möglichkeiten sowie reine Software Simulationen ermöglicht.
Mission Statement von Racoon
"Im Racoon-Lab werden Technologien für Nahbereichsoperationen robotischer Weltraumsysteme end-to-end entwickelt und evaluiert."
- Technologie: Wir konzentrieren uns auf konkrete Technologielösungen die wir in unserem Labor entwickeln und evaulieren können.
- End-To-End: Unsere Simulationsumgebung ist in der Lage das gesamte System vom Roboter im Weltraum bis zum Menschlichen Operator am Boden zu simulieren.
- Entwicklung: Wir entwickeln neue Technologien im Rahmen unseres Referenzszenarios
- Evaluation: Wir evaluieren die Leistungsfähigkeit existierender Technologien im Rahmen unseres Referenzszenarios
- Weltraumrobotik: Wir arbeiten an Technologien für robotische Weltraumsysteme
- Nahbereichsoperationen: Wir arbeiten an Technologien im Nahbereich zweier Raumfahrzeuge (Entfernungen < 20 m)´ohne Docking/Einfangen.
Themenschwerpunkte
Die Arbeiten im Racoon-Lab konzentrieren sich auf zwei Themenschwerpunkte:
- Human Spacecraft Interaction (HSI)
- Autonomous Guidance, Nacigation and Control (GNC)
Im ersten Schwerpunkt werden Entwicklungen durchgeführt die eine optimale Einbindung des Menschen in die Kontrolle eines robotischen Raumfahrzeuges gewährleisten sollen. Hierbei stellt die Abwägung von teil-autonomen Reglern und Eingriffsmöglichkeiten durch den Mensch die wichtigeste Arbeit dar.
Im zweiten Bereich entwickeln und testen wir verbesserte Algorithmen zum teil- oder voll-autonomen Endanflügen an unkooperative Ziele.
Weiterführende Informationen
Ein Überblick über die Forschungsarbeiten sind hier zu finden: Research Projects
Allgemeine Technische Daten zum Labor: RACOON Lab Info Deck
Ansprechpartner: Jan Harder, Martin Dziura
Publications
2016
Artigas, Jordi; Balachandran, Ribin; Stefano, Marco de; Panzirsch, Michael; Lampariello, Roberto; Albu-Schaeffer, Alin et al. (2016): Teleoperation for On-Orbit Servicing Missions through the ASTRA Geostationary Satellite. In: Proceedings of IEEE Aerospace Conference 2016. Big Sky, Montana.
Harder, Jan; Wilde, Markus; Ventura, Jacopo; Dziura, Martin (2016): Acoustic telepresence for spacecraft proximity operations. In: Proceedings of IEEE Aerospace Conference 2016. Big Sky, Montana, S. 1–12.
Ventura, Jacopo; Ciarcia, Marco; Romano, Marcello; Walter, Ulrich (2016): An Inverse Dynamics-Based Trajectory Planner for Autonomous Docking to a Tumbling Target. In: Proceedings of the Navigation and Control Conference, January. AIAA Guidance.
Ventura, Jacopo; Ciarcià, Marco; Romano, Marcello; Walter, Ulrich (2016): Fast and Near-Optimal Guidance for Docking to Uncontrolled Spacecraft. In: Journal of Guidance, Control, and Dynamics, S. 1–17. DOI: 10.2514/1.G001843.
Ventura, Jacopo; Fleischner, Andreas; Walter, Ulrich (2016): Pose Tracking of a Noncooperative Spacecraft During Docking Maneuvers Using a Time-of-Flight Sensor. In: Proceedings of the Navigation and Control Conference, January. AIAA Guidance.
2015
Harder, J.; Preis, L. (2015): User Study on Human Visual Inspection Capabilities of Space Debris Status. In: Deutscher Luft- und Raumfahrtkongress 2015. Luft- und Raumfahrt - Leuchtturm der Innovation. Rostock, 22.-24.9.2015. DGLR, zuletzt geprüft am 26.11.2015.
Ventura, Jacopo; Romano, Marcello; Walter, Ulrich (2015): Performance evaluation of the inverse dynamics method for optimal spacecraft reorientation. In: Acta Astronautica 110, S. 266–278. DOI: 10.1016/j.actaastro.2014.11.041.
Wilde, Markus; Harder, Jan T.; Ventura, Jacopo; Hörmann, Julian; Walter, Ulrich (2015): Impact of Space-to-Ground Video Transmission Constraints on Teleoperated Final Approach and Docking. In: Journal of Aerospace Information Systems 12 (7), S. 441–454. DOI: 10.2514/1.I010288.
2014
Purschke, Ralf; Hoehn, Alexander (2014): Evaluation and test of different gear concepts for Ka-band Antenna Pointing Mechanisms. In: 2014 IEEE Aerospace Conference. Big Sky, MT, USA, 1.-8. March 2014, S. 1–8.
Tan, Jingwen; Ma, Weihua; Wang, Mingming; Luo, Jianjun (2014): Relative Navigation for Space Synchronization Based on GNSS Carrier Phase. In: IAF (Hg.): Proceedings of the 65th International Astronatical Congress. 65th International Astronatical Congress. Toronto, Canada, 29. September - 3. October 2014. International Astronautical Federation, zuletzt geprüft am 26.01.2015.
Ventura, Jacopo; Romano, Marcello (2014): Exact Analytic Solution for the Spin-up Maneuver of an Axially Symmetric Spacecraft. In: Acta Astronautica 104 (1). DOI: 10.1016/j.actaastro.2014.07.038.
2013
Harder, Jan; Wilde, Markus; Fleischner, Andreas (2013): Technology development for real-time teleoperated spacecraft mission operations. In: 2013 IEEE Aerospace Conference. Big Sky, MT, 2.-3. March 2013, S. 1–10.
Purschke, R.; Hoehn, A. (2013): Design and characterization of an Antenna Pointing Mechanism for on-orbit servicing missions. In: 2013 IEEE Aerospace Conference. Big Sky, MT, 2.-3. March 2013, S. 1–8, zuletzt geprüft am 29.01.2015.
Wang, Mingming; Walter, U.; Luo, Jianjun; Ma, Weihua (2013): A DDS Based Real-Time Simulation Architecture for Space Robotic Tele-Operation. In: IAF (Hg.): Proceedings of the 64th International Astronautical Congress. International Astronautical Congress. Beijing, China. International Astronautical Federation, zuletzt geprüft am 23.01.2015.
Wang, Mingming; Walter, Ulrich (2013): Joint Space Dynamics Algorithm for Tree Structure Space Manipulators by Using Inertia Mapping Matrix. In: Zdravko Terze (Hg.): ECCOMAS Thematic Conference on Multibody Dynamics 2013. Zagreb, Croatia, July 1-4, 2013 : book of abstracts. Zagreb: University of Zagreb. Faculty of Mechanical Engineering and Naval Architecture, zuletzt geprüft am 23.01.2015.
Wang, Mingming; Walter, Ulrich (2013): Joint-Space Dynamics Algorithm of Space Manipulators with Tree Structure using Inertia Mapping Matrix. In: IAF (Hg.): Proceedings of the 64th International Astronautical Congress. International Astronautical Congress. Beijing, China. International Astronautical Federation, zuletzt geprüft am 23.01.2015.
Wang, Mingming; Walter, Ulrich (2013): Kinematics Analysis of Free-Floating Redundant Space Manipulator based on Momentum Conservation. In: Deutsches Zentrum für Luft- und Raumfahrt (Hg.): Proceedings of the 5th International Conference on Spacecraft Formation Flying Missions and Technologies. 5th International Conference on Spacecraft Formation Flying Missions and Technologies. Munich, Germany, 29.-31. May 2013, zuletzt geprüft am 23.01.2015.
Wang, Mingming; Walter, Ulrich; Luo, Jianjun (2013): A Nonlinear Model Predictive Controller for Kinematically Redundant Space Manipulator. In: IAF (Hg.): Proceedings of the 64th International Astronautical Congress. International Astronautical Congress. Beijing, China. International Astronautical Federation, zuletzt geprüft am 23.01.2015.
Wilde, Markus; Harder, Jan; Purschke, Ralf (2013): Operator learning effects in teleoperated rendezvous & docking. In: 2013 IEEE Aerospace Conference. Big Sky, MT, 2.-3. March 2013, S. 1–11.
2012
Harder, J.; Walter, U. (2012): Communication Architecture Evaluation for Real-Time Tele-Operated Spacecraft. In: Proceedings of the IEEE Aerospace Conference. DOI: 10.1109/AERO.2012.6187099.
Wilde, M.; Hannon, S. C.; Walter, U. (2012): Evaluation of Head-Up Displays for Teleoperated Rendezvous & Docking. In: Proc. of the 2012 IEEE Aerospace Conference.
2011
Harder, J.; Purschke, R.; Walter, U. (2011): Implementation of a Ka-Band communication path for on-orbit servicing. In: Proceedings of the International Astronautical Congress 2011.
Letschnik, J.; Schelde, L.; Harder, J.; Walter, U. (2011): An advanced research environment for Ka-band satellite communications. In: 62nd International Astronautical Congress, South Africa.
2010
Fleischner, Andreas; Wilde, Markus; Walter, Ulrich (2010): Racoon - a hardware-in-the-loop simulation environment for teleoperated proximity operations. In: I-SAIRAS (Hg.): Proceedings of the International Symposium on Artificial Intelligence, Robotics and Automation in Space. International Symposium on Artificial Intelligence, Robotics and Automation in Space. Turino. ESA, DLR, CSA, JAXA, NASA.
Pietras, M.; Rems, F.; Walter, U. (2010): Real-Time Evaluation of Attitude Constrains during Space Robot Operations. In: Proc. of International Astronautical Congress, Praha.
Purschke, R.; Harder, J.; Fleischner, A. (2010): Demonstration of a Ka-Band communication path for On-Orbit Servicing. In: Amostech (Hg.): Proceedings of the AMOS Conference 2010. AMOS.
Wilde, M.; Hamacher, J. P.; Walter, U. (2010): Experimental Head-Up Display for Space Telerobotics. In: Proc. of International Symposium on Artificial Intelligence, Robotics and Automation in Space (iSAIRAS) 2010.
Wilde, M.; Walter, U. (2010): A Robotic Camera Arm for Increased Situation Awareness in Telepresent On-Orbit Servicing. In: Proc. of the 2010 IEEE Aerospace Conference. DOI: 10.1109/AERO.2010.5446758.
2009
Pietras, M.; Wilde, M.; Walter, U. (2009): Real-Time Earth Observation via Data-Relay Satellites for quick Response Services. In: 13th ISU Annual International Symposium: ”Space for a Safe and Secure World” ISU Campus, Strasbourg.
Stoll, E.; Letschnik, J.; Walter, U.; Artigas, J.; Kremer, P.; Preusche, C.; Hirzinger, G. (2009): On-Orbit Servicing – Exploration and Manipulation Capabilities of Robots in Space. In: IEEE Robotics and Automation Magazine, S. 29–33.
Stoll, E.; Wilde, M.; Pong, C. (2009): Using Virtual Reality for Human-Assisted In-Space Robotic Assembly. In: Proc. of the World Congress on Engineering and Computer Science.
Wilde, M.; Friedmann, L.; Walter, U. (2009): Intitive One-Hand Controls for Robotic Camera Arms. In: Proc. of the 14th IASTED International Conference Robotics and Applications.
Wilde, M.; Walter, U. (2009): Operator Assistance for Telepresent On-Orbit Servicing. In: Proc. of the 14th IASTED International Conference Robotics and Applications.
Industriekontakte
Wir danken allen unseren Partnern für die erfolgreiche Kooperation
