RACOON Lab
Motivation
Recently, the main efforts have been focused on developing spacecraft rendezvous technologies for proximity flights and docking operations. This research has been motivated by the new generation of space missions such as debris removal and robotic on-orbit servicing to repair, refuel and upgrade disabled spacecraft.
Uncooperative targets, on the contrary, do not assist the chaser during the maneuver since they are not equipped with dedicated docking features and their attitude is not controlled. Examples of uncooperative targets are space debris or end-of-life spacecraft, which represent the majority of targets for on-orbit servicing and space debris removal missions.
Racoon Mission Statement
"RACOON does end-to-end technology development and evaluation in space robotics for close-range proximity operations."
- End-to-End: Our unique selling proposition is, that we are able to consider the whole system down from the human operator up to the orbiting satellites.
- Technology: We will focus on a concrete technology, which is going to be developed or evaluated within our environment.
- Development: We will develop new technology within the described reference scenarios.
- Evaluation: We will evaluate existing technology within the described reference scenarios.
- Space Robotics: We will focus on technology for space robotics.
- Close-range: We will focus on technology for the close-range navigation (less than 20m).
- Proximity ops: We will focus on the proximity operations and will not cover the capture itself.
Fields of Interest
On-Orbit Servicing (OOS) in general and ADR space missions in particular may require a level of system flexibility that autonomous systems may not yet be capable of, or for which they may not be the most efficient solution. Such missions may therefore initially include a mix of real time tele-operation and autonomous technologies.This opens up a number of research questions concerning the ideal balance between autonomous functions and manual control, and their implementation. To address these questions we conduct experiments and develop prototypes in two focus areas:
- Human Spacecraft Interaction deals with the development and evaluation of concepts and technologies to include the human into the control loop for safe and efficient operations.
- Proximity Operations Spacecraft Dynamics develops technologies for Guidance, Navigation and Control (GNC) tasks during final approach with target satellites
The work in the two focus areas focuses within the ADR reference scenario on proximity operations before capturing/docking with uncooperative target objects. Depending on the research focus different setups of the setup can be used to simulate parts or the complete end-to-end scenario.
Human Spacecraft Interaction
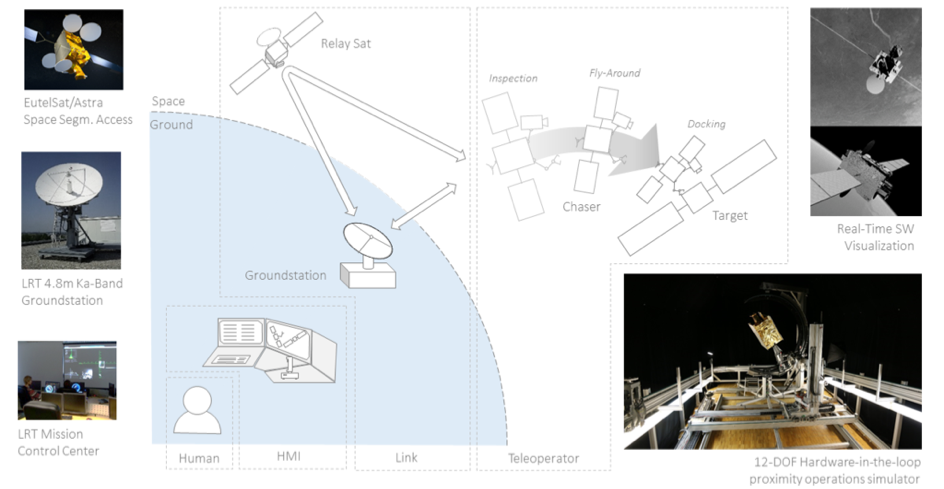
Following the assumption of a human inclusion in the spacecraft control loop, different challenges arise. Purely manual teleoperation seems not ideal due to limited situational awareness, high cost in broadband communication connections, latencies and the superiority of automated closed loop onboard control systems with respect to precision and response time (especially for repetitive tasks). Full autonomy on the other hand may not be feasible for unstructured environments and tasks as foreseen in ADR missions. Thus, with a supervised autonomy control concept in mind the focal point of the research is the role of the human operator during ADR missions and his ideal inclusion in the control loop. With increasing capabilities and precision of autonomous tele-operators we expect the role of the human operator to increasingly focus on supervision of the theater of operations, risk mitigation and contingency operations, taking advantage of the human strength in situation analysis, intuition and problem solving during unforeseen situations. Thus, the research work will evaluate conceptual and technological solutions to include the human in the loop through determining sensor data quantity, quality of service and HMI design needed for safe and efficient operations. To allow this evaluation, fundamental research deals with the definition and classification of required tasks during ADR missions and likely human/machine distribution of these tasks. Besides the task definition it is our goal to extend existing quality metrics (e.g. Situational Awareness, Operator Workload) to find a common standard for evaluating spacecraft control concepts. Based on this fundamental knowledge it is our main goal to envisage, prototype and evaluate new technologies for ideally including the human operator in the spacecraft control loop. Compared to traditional procedural mission operation of static spacecraft, future agile robotic missions will demand higher flexibility and pace at task planning, execution and supervision. This calls for improved human machine interfaces, adaptive sensor data sampling, transmission and presentation in near real-time. To achieve these goals the RACOON Lab’s simulation environment is used to implement system designs in user studies, simulating the final phase of proximity maneuvering, inspection and docking with uncooperative targets. To provide a simulation environment that is as realistic as possible, the lab also incorporates teleoperation system elements like communication link, teleoperator/target design and relevant space environment aspects (e.g. lighting).
More Information
Further information about current research topics: Research Projects
General Technical Specifications of the Lab: RACOON Lab Info Deck
Point of Contact: Jan Harder, Martin Dziura
Publications
2016
Artigas, Jordi; Balachandran, Ribin; Stefano, Marco de; Panzirsch, Michael; Lampariello, Roberto; Albu-Schaeffer, Alin et al. (2016): Teleoperation for On-Orbit Servicing Missions through the ASTRA Geostationary Satellite. In: Proceedings of IEEE Aerospace Conference 2016. Big Sky, Montana.
Harder, Jan; Wilde, Markus; Ventura, Jacopo; Dziura, Martin (2016): Acoustic telepresence for spacecraft proximity operations. In: Proceedings of IEEE Aerospace Conference 2016. Big Sky, Montana, S. 1–12.
Ventura, Jacopo; Ciarcia, Marco; Romano, Marcello; Walter, Ulrich (2016): An Inverse Dynamics-Based Trajectory Planner for Autonomous Docking to a Tumbling Target. In: Proceedings of the Navigation and Control Conference, January. AIAA Guidance.
Ventura, Jacopo; Ciarcià, Marco; Romano, Marcello; Walter, Ulrich (2016): Fast and Near-Optimal Guidance for Docking to Uncontrolled Spacecraft. In: Journal of Guidance, Control, and Dynamics, S. 1–17. DOI: 10.2514/1.G001843.
Ventura, Jacopo; Fleischner, Andreas; Walter, Ulrich (2016): Pose Tracking of a Noncooperative Spacecraft During Docking Maneuvers Using a Time-of-Flight Sensor. In: Proceedings of the Navigation and Control Conference, January. AIAA Guidance.
2015
Harder, J.; Preis, L. (2015): User Study on Human Visual Inspection Capabilities of Space Debris Status. In: Deutscher Luft- und Raumfahrtkongress 2015. Luft- und Raumfahrt - Leuchtturm der Innovation. Rostock, 22.-24.9.2015. DGLR, zuletzt geprüft am 26.11.2015.
Ventura, Jacopo; Romano, Marcello; Walter, Ulrich (2015): Performance evaluation of the inverse dynamics method for optimal spacecraft reorientation. In: Acta Astronautica 110, S. 266–278. DOI: 10.1016/j.actaastro.2014.11.041.
Wilde, Markus; Harder, Jan T.; Ventura, Jacopo; Hörmann, Julian; Walter, Ulrich (2015): Impact of Space-to-Ground Video Transmission Constraints on Teleoperated Final Approach and Docking. In: Journal of Aerospace Information Systems 12 (7), S. 441–454. DOI: 10.2514/1.I010288.
2014
Purschke, Ralf; Hoehn, Alexander (2014): Evaluation and test of different gear concepts for Ka-band Antenna Pointing Mechanisms. In: 2014 IEEE Aerospace Conference. Big Sky, MT, USA, 1.-8. March 2014, S. 1–8.
Tan, Jingwen; Ma, Weihua; Wang, Mingming; Luo, Jianjun (2014): Relative Navigation for Space Synchronization Based on GNSS Carrier Phase. In: IAF (Hg.): Proceedings of the 65th International Astronatical Congress. 65th International Astronatical Congress. Toronto, Canada, 29. September - 3. October 2014. International Astronautical Federation, zuletzt geprüft am 26.01.2015.
Ventura, Jacopo; Romano, Marcello (2014): Exact Analytic Solution for the Spin-up Maneuver of an Axially Symmetric Spacecraft. In: Acta Astronautica 104 (1). DOI: 10.1016/j.actaastro.2014.07.038.
2013
Harder, Jan; Wilde, Markus; Fleischner, Andreas (2013): Technology development for real-time teleoperated spacecraft mission operations. In: 2013 IEEE Aerospace Conference. Big Sky, MT, 2.-3. March 2013, S. 1–10.
Purschke, R.; Hoehn, A. (2013): Design and characterization of an Antenna Pointing Mechanism for on-orbit servicing missions. In: 2013 IEEE Aerospace Conference. Big Sky, MT, 2.-3. March 2013, S. 1–8, zuletzt geprüft am 29.01.2015.
Wang, Mingming; Walter, U.; Luo, Jianjun; Ma, Weihua (2013): A DDS Based Real-Time Simulation Architecture for Space Robotic Tele-Operation. In: IAF (Hg.): Proceedings of the 64th International Astronautical Congress. International Astronautical Congress. Beijing, China. International Astronautical Federation, zuletzt geprüft am 23.01.2015.
Wang, Mingming; Walter, Ulrich (2013): Joint Space Dynamics Algorithm for Tree Structure Space Manipulators by Using Inertia Mapping Matrix. In: Zdravko Terze (Hg.): ECCOMAS Thematic Conference on Multibody Dynamics 2013. Zagreb, Croatia, July 1-4, 2013 : book of abstracts. Zagreb: University of Zagreb. Faculty of Mechanical Engineering and Naval Architecture, zuletzt geprüft am 23.01.2015.
Wang, Mingming; Walter, Ulrich (2013): Joint-Space Dynamics Algorithm of Space Manipulators with Tree Structure using Inertia Mapping Matrix. In: IAF (Hg.): Proceedings of the 64th International Astronautical Congress. International Astronautical Congress. Beijing, China. International Astronautical Federation, zuletzt geprüft am 23.01.2015.
Wang, Mingming; Walter, Ulrich (2013): Kinematics Analysis of Free-Floating Redundant Space Manipulator based on Momentum Conservation. In: Deutsches Zentrum für Luft- und Raumfahrt (Hg.): Proceedings of the 5th International Conference on Spacecraft Formation Flying Missions and Technologies. 5th International Conference on Spacecraft Formation Flying Missions and Technologies. Munich, Germany, 29.-31. May 2013, zuletzt geprüft am 23.01.2015.
Wang, Mingming; Walter, Ulrich; Luo, Jianjun (2013): A Nonlinear Model Predictive Controller for Kinematically Redundant Space Manipulator. In: IAF (Hg.): Proceedings of the 64th International Astronautical Congress. International Astronautical Congress. Beijing, China. International Astronautical Federation, zuletzt geprüft am 23.01.2015.
Wilde, Markus; Harder, Jan; Purschke, Ralf (2013): Operator learning effects in teleoperated rendezvous & docking. In: 2013 IEEE Aerospace Conference. Big Sky, MT, 2.-3. March 2013, S. 1–11.
2012
Harder, J.; Walter, U. (2012): Communication Architecture Evaluation for Real-Time Tele-Operated Spacecraft. In: Proceedings of the IEEE Aerospace Conference. DOI: 10.1109/AERO.2012.6187099.
Wilde, M.; Hannon, S. C.; Walter, U. (2012): Evaluation of Head-Up Displays for Teleoperated Rendezvous & Docking. In: Proc. of the 2012 IEEE Aerospace Conference.
2011
Harder, J.; Purschke, R.; Walter, U. (2011): Implementation of a Ka-Band communication path for on-orbit servicing. In: Proceedings of the International Astronautical Congress 2011.
Letschnik, J.; Schelde, L.; Harder, J.; Walter, U. (2011): An advanced research environment for Ka-band satellite communications. In: 62nd International Astronautical Congress, South Africa.
2010
Fleischner, Andreas; Wilde, Markus; Walter, Ulrich (2010): Racoon - a hardware-in-the-loop simulation environment for teleoperated proximity operations. In: I-SAIRAS (Hg.): Proceedings of the International Symposium on Artificial Intelligence, Robotics and Automation in Space. International Symposium on Artificial Intelligence, Robotics and Automation in Space. Turino. ESA, DLR, CSA, JAXA, NASA.
Pietras, M.; Rems, F.; Walter, U. (2010): Real-Time Evaluation of Attitude Constrains during Space Robot Operations. In: Proc. of International Astronautical Congress, Praha.
Purschke, R.; Harder, J.; Fleischner, A. (2010): Demonstration of a Ka-Band communication path for On-Orbit Servicing. In: Amostech (Hg.): Proceedings of the AMOS Conference 2010. AMOS.
Wilde, M.; Hamacher, J. P.; Walter, U. (2010): Experimental Head-Up Display for Space Telerobotics. In: Proc. of International Symposium on Artificial Intelligence, Robotics and Automation in Space (iSAIRAS) 2010.
Wilde, M.; Walter, U. (2010): A Robotic Camera Arm for Increased Situation Awareness in Telepresent On-Orbit Servicing. In: Proc. of the 2010 IEEE Aerospace Conference. DOI: 10.1109/AERO.2010.5446758.
2009
Pietras, M.; Wilde, M.; Walter, U. (2009): Real-Time Earth Observation via Data-Relay Satellites for quick Response Services. In: 13th ISU Annual International Symposium: ”Space for a Safe and Secure World” ISU Campus, Strasbourg.
Stoll, E.; Letschnik, J.; Walter, U.; Artigas, J.; Kremer, P.; Preusche, C.; Hirzinger, G. (2009): On-Orbit Servicing – Exploration and Manipulation Capabilities of Robots in Space. In: IEEE Robotics and Automation Magazine, S. 29–33.
Stoll, E.; Wilde, M.; Pong, C. (2009): Using Virtual Reality for Human-Assisted In-Space Robotic Assembly. In: Proc. of the World Congress on Engineering and Computer Science.
Wilde, M.; Friedmann, L.; Walter, U. (2009): Intitive One-Hand Controls for Robotic Camera Arms. In: Proc. of the 14th IASTED International Conference Robotics and Applications.
Wilde, M.; Walter, U. (2009): Operator Assistance for Telepresent On-Orbit Servicing. In: Proc. of the 14th IASTED International Conference Robotics and Applications.
