EAZS - Electrolysis-propulsion-based Autonomous Zero-debris Spacecraft
For activities in space to be fully sustainable a circular economy must be achieved. This means that sustainability aspects are considered over the span of the entire life cycle of space infrastructure from conception to end-of-life. This encompasses:
- design and manufacturing, which use clean energy sources, and which comprise clean materials and fluids for all major systems and subsystems of a spacecraft and even make use of resources found in space (in-situ resource utilisation), all of which is to be economically viable;
- sustainable operations, which on the one hand ensure that the infrastructure in orbit is resilient to hazards and is also equally capable of avoiding hazards, such as the risk of collision with debris or other active spacecraft (necessary for zero-debris in space), but is also mindful of the use of resources and optimises their use (energy consumption, optimisation of use of orbital slots, frequency bands, etc.), which implies a certain level of onboard intelligence, health monitoring, and ultimately autonomy; and
- end-of-life concepts, which ensure that no longer needed spacecraft leave no trace either through demisability of the components the spacecraft is made of, or through recycling (up or down cycling).
EAZS addresses each of these 3 phases above in the lifespan of a space infrastructure by advancing key concepts and technologies:
- address sustainable operations by conducting research for the design of an advanced operating system, i.e. a system-level autonomous agent, aimed at the optimisation of onboard resources (power, heat, and propellants), as well as enabling real-time reaction to emergency scenarios such as collision risk;
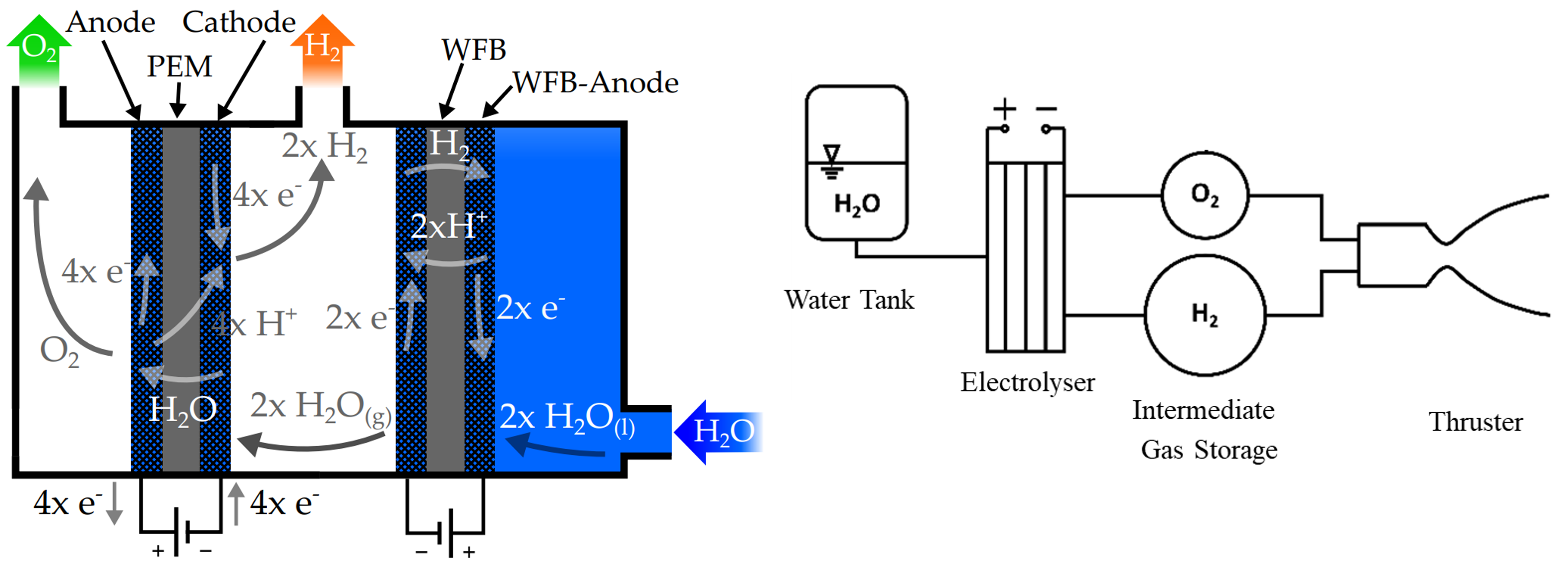
- address sustainable design and manufacturing by advancing key technologies for a propulsion subsystem, Water Electrolysis Propulsion (WEP) based on the cleanest of all possible propellants, namely water (H2O), without compromising and even boosting performance and in replacement of currently used toxic hydrazine-based propellants (see Figure 1 for the basic working principle of the thruster and electrolyser); and finally
- address end-of-life sustainability and further contribute to a zero-debris policy by examining, proposing, and designing re-fuelling of the onboard water, as well as easy dismantling for future recycling purposes of the CubeSat prototype.
Each of the elements 1-3 above involve ambitious R&D building
The outcome of this proposal will be the EAZS prototype CubeSat (with a of TRL 6 or more) comprising (1) an autonomous system-level agent, (2) a Water Electrolysis Propulsion subsystem, and (3) a zero-debris mechanical and fluidic configuration and setup. In addition, it is a stretch goal of this proposal to perform in orbit demonstration of the EAZS CubeSat within the timeline of the project here proposed. If achieved, this will be a world-first. Figure 2 shows a conceptual example of a possible layout of the EAZS CubeSat prototype.
The work not only aims at developing key technologies, but also has the clear ambition of demonstrating the feasibility – in the short-term – of such technologies, therefore lowering the entry barrier to sustainability-driven technologies and giving renewed impulse to the implementation of sustainability in all dimensions of human action. It must be noted that CubeSats today are the tool and representation of an easy access to space and because of their low cost have been used with little regard to the serious implications that their use – without a propulsion subsystem – and their prolonged presence in orbit has on the sustainability of the space environment in orbits critical to space infrastructure we use for providing critical services to societies, governments and economies on ground. The symbolism of leading sustainability efforts in space through a CubeSat should not be overlooked. This endeavour is nothing less than a Moonshot!
Autonomous Goal-Oriented Operations
No technology exists today which enables E4 level autonomy (i.e. goal-oriented autonomy), as defined by the European Space Agency [Vassev (2014)]. This level of autonomy means that a system is capable of autonomously deliberating on the goals of the mission themselves [Abbass (2018)] and task and re-plan activities it needs to perform. Goal reasoning is the study of how autonomous agents can dynamically reason about and adjust their goals. Two models for goal reasoning are (1) Goal-Driven Autonomy (GDA) which allows an autonomous agent to not only manage existing goals, but to also introduce new goals, and pre-empt active goals and (2) Goal Lifecycle (GL) whereby goals transition through stages of increasingly detailed modes by activating a series of refinement strategies.
NASA made the first attempts at in-space autonomy with the Deep Space 1 (DS 1) mission which was launched in 1998. Amongst the various goals of DS1 was to test the Remote Agent Experiment (RAX). The spacecraft functioned completely autonomously for 29 hours, and RAX successfully operated the spacecraft, responding to both simulated and real failures [Frost (2010)]. Another example is the EO1 Autonomous Sciencecraft Experiment (ASE), which included autonomous onboard fault diagnosis and recovery. ASE also included autonomy of the science instruments and downlink of the resulting imagery and data. ASE successful demonstrated its capability in 2004, when the system independently captured an image of volcanic activity on Mt. Erebus having previously detected an anomalous heat signature and scheduled a new observation [Frost (2010)]. In the past two decades some further research and further demonstrations have been made (for example PhiSat-1 which replicated the ASE use-case in 2020) but no significant breakthroughs have been made since. Breakthroughs are needed if systems are to be capable of protecting themselves from hazards and contribute to sustainability [Birk (2018)].