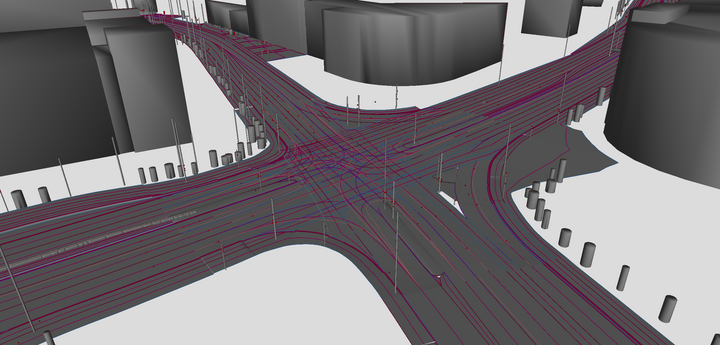
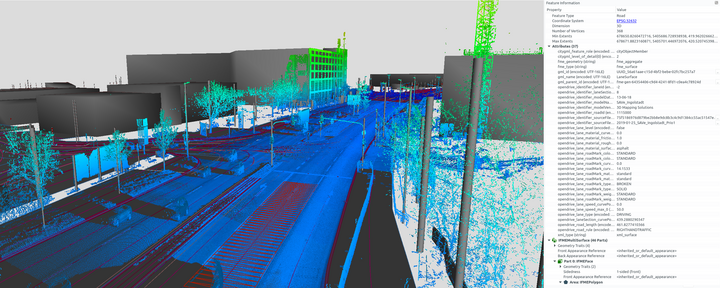
To test automated driving functions, highly-detailed reference maps are created and described in the road networks standard OpenDRIVE. As OpenDRIVE was developed for the very specific field of vehicle simulation, the tool support within the GIS domain is limited.
To bridge this gap, the Chair of Geoinformatics has published the road space transformer r:trån on GitHub. The open source project converts available OpenDRIVE datasets to the virtual 3D city model standard CityGML. The dual representation enables the usage of OpenDRIVE datasets within well-established GIS tools such as the 3DCityDB, QGIS and FME. Further demos and application examples can be found on the project website https://rtron.io. The project was developed in the context of the publicly funded research project SAVe which is led by AUDI AG and brings together several partners from industry, research and public administration.
If you are interested in vehicle environment simulation, have a look at our recent paper where we couple a submicroscopic driving simulator with a pedestrian behavior simulation framework at runtime. The application-specific target formats are automatically generated prior to the simulation run:
-
Schwab, Benedikt; Beil, Christof; Kolbe Thomas H.: Spatio-Semantic Road Space Modeling for Vehicle–Pedestrian Simulation to Test Automated Driving Systems. Sustainability 12 (9), 2020, 3799 more… BibTeX
Moreover, these papers may also be of interest:
-
Kutzner, Tatjana; Chaturvedi, Kanishk; Kolbe, Thomas H.: CityGML 3.0: New Functions Open Up New Applications. PFG – Journal of Photogrammetry, Remote Sensing and Geoinformation Science, 2020, 19 more… BibTeX
-
Schwab, Benedikt; Kolbe, Thomas H.: Requirement Analysis of 3D Road Space Models for Automated Driving. ISPRS Annals of Photogrammetry, Remote Sensing and Spatial Information Sciences IV-4/W8, 2019, 99-106 more… BibTeX
-
Beil, Christof; Kolbe, Thomas H.: CityGML and the streets of New York - A proposal for detailed street space modelling. Proceedings of the 12th International 3D GeoInfo Conference 2017 (ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences), ISPRS, 2017, 9-16 more… BibTeX