Autonomous Rotorcraft for Extreme Altitudes (AREA) in Synchropter (Flettner) Configuration

History of the AERA Drone
The civil research project Autonomous Rotorcraft for Extreme Altitudes (AREA) is devoted to lightweight rotary wing UAVs for applications at high altitudes of up to 9000m, such as search and rescue as well as different types of environmental monitoring. Up to now, such rotary wing UAVs have not been available. Consequently, experience in design and operation of rotary wing UAVs in such environments is lacking. This situation motivates our team from DLR and TUM to work on an all-electric prototype of this kind of rotary wing UAV. The first experimental missions will be performed at altitudes starting at 5000m above sea level.
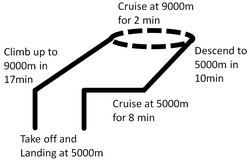
The challenge of designing a rotary wing UAV with available batteries and a maximum take-off weight of approximately 40kg demands the complete system to be extremely efficient over the whole mission profile. With regard to the rotor this means low values of blade loading at sea level are necessary, reducing power and retarding the onset of stall at higher altitudes. Compared to a conventional helicopter with main and tail rotor and the same disc loading, dual rotor configurations while hovering or at low speeds generally require less power for a given thrust. Therefore it is decided to design a Fletter type helicopter with intermeshing rotors. In addition to meet the extreme requirements for the UAV, rotor blades are designed, tested and built at TUM.
The project was supported by a MunichAerospace scholarship.
Keywords: High Altitude Helicopter Drone, Hubschrauberdrohne, Flettner, Synchropter.
NEWS
AREA Flight Test at 2830m MSL (41 different flights with different rotor speeds and gross weights were made on 2018-11-08)
Flight Testing of the TUM/DLR Rotorcraft Prototype for High Altitudes with Intermeshing Rotors.

AREA Flight Test Forward Flight
AREA Flight Test Attitude Controller Doublets and Hover
AREA Flight Test with 20kg payload and rate controller
Flight Tests for Model Validation with automatic Doublet and Step Inputs, 900ft/min vertical climb demonstration
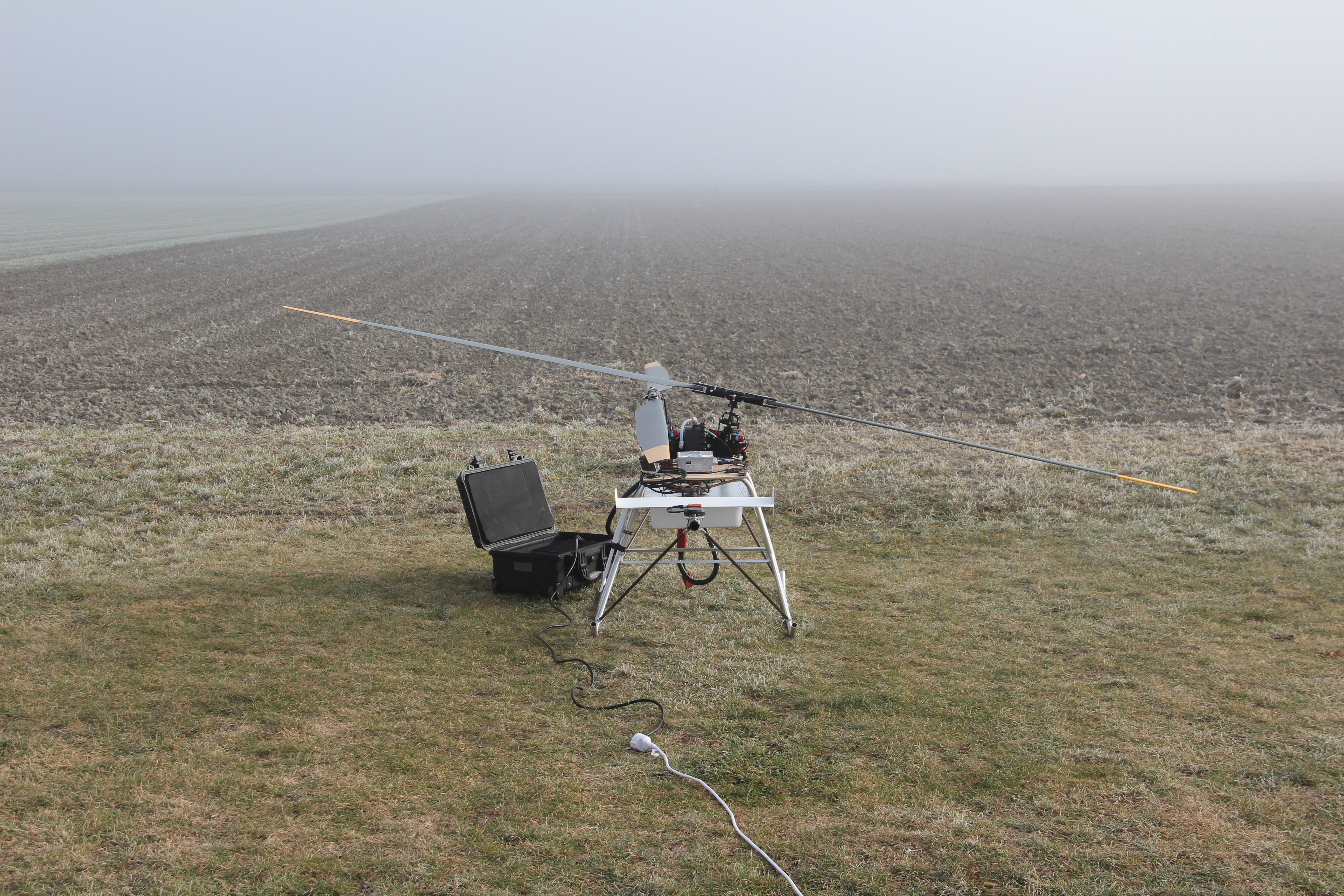
Some impressions of the last weeks...





AREA first flight
Succesfull first hover test of a pre prototype with off the shelf parts

On June 19 2015, the first hover flight tests with a pre prototype (with mosty off the shelf parts) were performed. The all-electric system was operated at design configuation. But it emerged that the off-the-shelf parts do not satisfy our requirements. Thanks a lot again to SwissDronesAG for conducting the flights!
Succesfull first hover fligth test of new AREA rotorblades

On June 11 2015, the first flight with the new in house developed, manufactured and tested AREA rotorblades was performed from SwissDronesAG with their Dragon50 system. The T/O mass was 85kg! Thanks a lot for that!
The balancing and tracking quality was very good, also the steering behavior.
Combined tensile & bending test for the AREA rotor blade
On March 23 2015 a combined tensile and bending test for the self developed AREA rotor blades was made. Great thanks to Prof. Baier and Mr. Krämer from the Institute of Leightweight Structures for their great support.The requirements for limit and ultimate load are by far exceeded once again.
Tensile test for the AREA rotor blade
On February 26 2015 a tensile test for the self developed AREA rotor blades was made in close collaboration with the Institute of Materials Science and Mechanics of Materials.The requirements for limit and ultimate load are by far exceeded and therefore the safety for people on ground is guaranteed and the available safety margins for the upcomming flight tests are determined.
Production of the first rotor blade for the AREA-Project
A first rotor blade prototype has been demolded on January 20th 2015. We would like to thank the Institute for Carbon Composites for the support during the manufacturing of the rotor blade.
AREA first flight with off-the-shelf blades and gearbox

A first flight was conducted on July 1st 2014. The flight was intended to perform system and control checks. The prototype hovered for 2x12min in an altitude of 10m above ground.
Kontakt
Dr.-Ing. A. Barth
Project Partners
German Aerospace Center (DLR)
Robotics and Mechatronics Center, RMC
Institute of Robotics and Mechatronics
www.dlr.de/rm