Contact: Maximilian Prexl
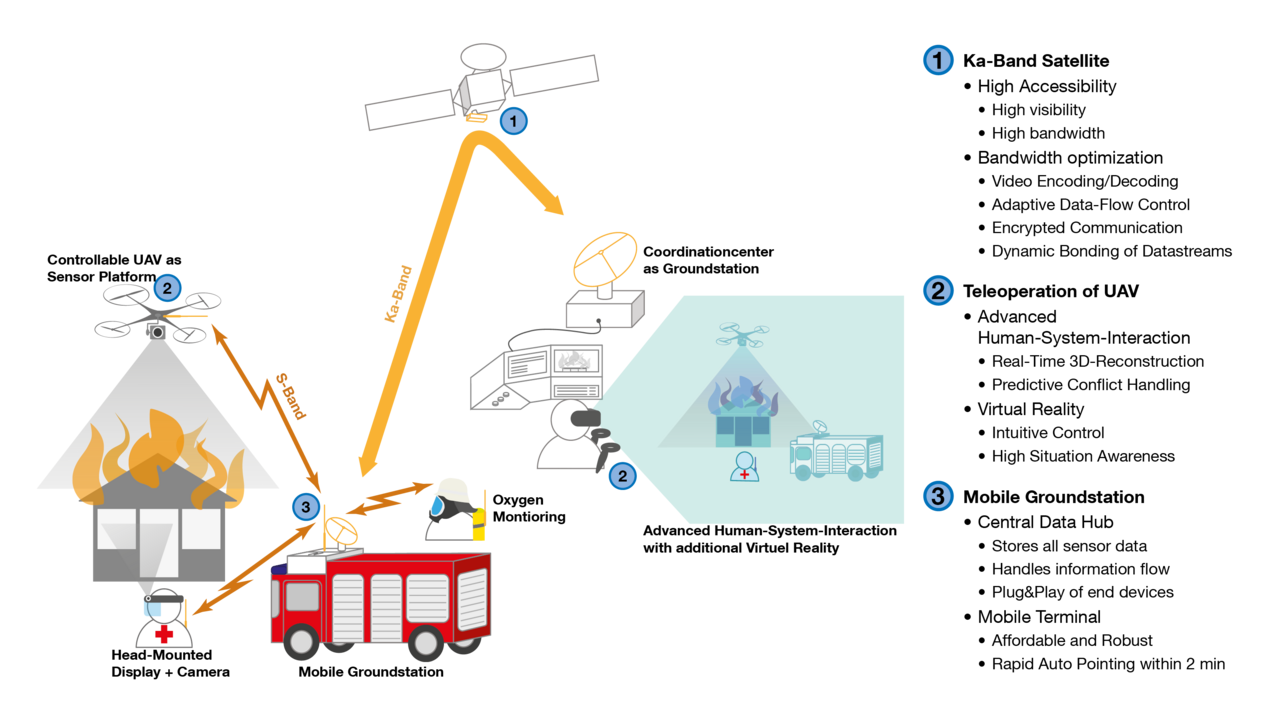
The CopKa system is a satellite-based, multisensory platform for mission support in the K/Ka band (17 - 30 GHz). The main focus here is on a telepresently controlled multi-sensor Unmanned Aerial Vehicle (UAV), which can be controlled by the dispatcher via the satellite link. The dispatcher in the control centre thus receives an improved picture of the situation and can better coordinate the emergency forces on site and support them in any search for persons.
Research Focus of the Project:
- Robustness and automatic alignment of the antenna
- Compact and cost-effective antenna
- Modular and intuitive mission management support software for mission leaders and dispatchers
- Innovative video decoding and encoding for transmitting image data
- Development of a human-system interface for a robust, safe and intuitive teleoperation

Starting point
The German rescue forces use a communication architecture that does not correspond to the current technical standard. Those in authorities and organisations with security tasks (BOS, i.e. police, fire brigade and rescue services) still use analogue radio technology in the 4 m and 2 m band, which was developed in the early 1970s. Since the further developed digital radio (TETRA) is not yet in widespread use, there are restrictions in the usability, especially of multimedia applications. Thus a new operational and communication concept for the modern rescue service is necessary, which is researched by CopKa.
Concept
The communication technology currently in use does not offer a modern infrastructure for modern multimedia applications. For example, voice communication between the emergency forces on site and the rescue control centre requires a high degree of radio discipline in order to be able to carry out precise situation reports. After the arrival of the first emergency forces, a large amount of time is required to record the emergency situation and situation and to communicate this to the control centres. The situation is only described to the control centre by voice communication. This procedure creates stress for the rescue forces and requires valuable time for the care of the patients, which can be reduced by innovative technology.
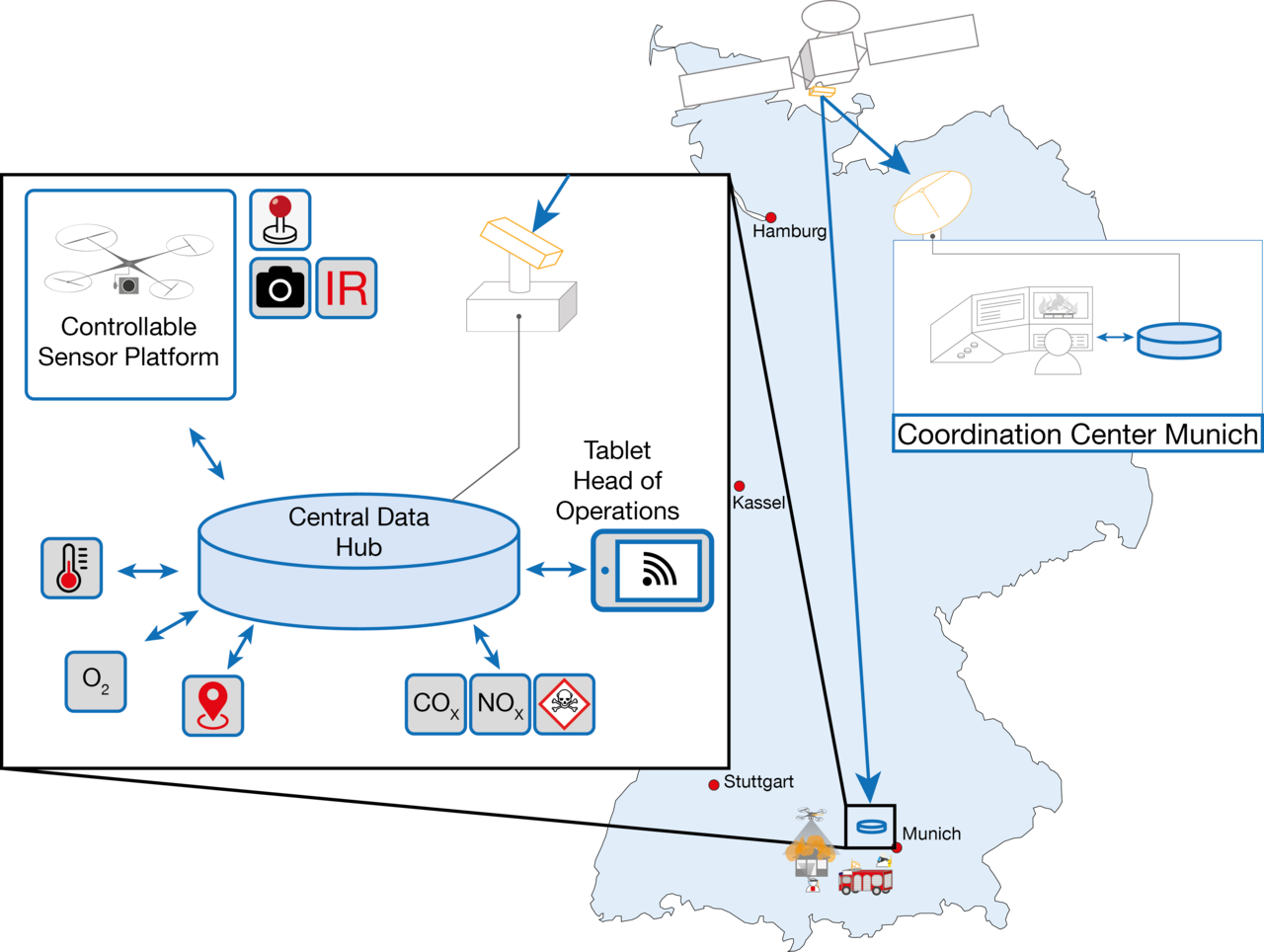
The project funded in CopKa is a communication architecture for a multisensory deployment, which has never been shown before. At its core, it consists of a kind of data center on the emergency vehicle, which collects all data and establishes a communication link between the emergency vehicle and the control center. The primary communication channel is a Ka-band satellite, which can be supported by a secondary communication link (LTE). This networked link configuration enables a safe and smooth operation and requires no intervention by the emergency forces. For this purpose, the SatCom terminal automatically aligns itself with the communications satellite and connects to it. Any sensors and systems can be added or removed at this interface. Thus the CopKa system has the capacity to connect autonomous systems (e.g. UAV), to control them and to detect various sensors.
Advantages of the concept for security authorities with safety responsibilities
The proposed concept has the advantage over technologies presented/used to date that high data rates can be ensured for use outside the mobile communications sector. This means that due to the high coverage of the satellite it is possible to have access to communication within Europe, even if no terrestrial system is available.
Furthermore, this concept allows the dispatcher to be directly involved in the deployment. The dispatcher is not only able to better evaluate the situation on the basis of the available data, but can also directly support the search for persons with a controllable UAV or carry out important gas measurements during the flight.
In order to enable the dispatcher as well as the operational command to have direct access to all existing information, the operating software offers the possibility to register different terminal devices to the CopKa system and to evaluate the relevance of the data and to distribute them via the satellite link, regardless of whether it is video, image or sensor data.
Consortium and project sponsor
CopKa is a project funded for 3 years (2015-2018) by the Federal Ministry of Economics and Technology (BMWi) (funding code 50YB1523) with the project partners Technical University of Munich (Institute of Astronautics), IMST GmbH, LSE Space GmbH, TV1 GmbH and the German Aerospace Center (Deutsches Zentrum für Luft- und Raumfahrt; DLR) as project sponsors.



Publications
M. Tebbe; M. Prexl; A. Hoehn; U. Walter (2017): Satellite Visibility Map for Emergency Services Applications. In: IAC 2017. Adelaide, AUS.
J. Letschnik; H. Enke; S. Letschnik; A. Hoehn; M. Tebbe; N. Zunhammer; M. Prexl; U. Walter; S. Otto; J. Mosig; A. Presta; M. Geissler; T. Christ; M. Westphal (2017): COPKA – SATELLITENBASIERTES SAR SYSTEM ZUR EINSATZFÜHRUNGSUNTERSTÜTZUNG VON BEHÖRDENANWENDUNGEN IM KA-BAND. In: DLRK Muenchen. Munich, GE.
M. Prexl; K. Struebig; J. Harder; A. Hoehn (2017): User studies of a head-mounted display for search and rescue teleoperation of UAVs via satellite link. In: IEEE Aerospace Conference 2017. Big Sky, Montana, USA.
M. Prexl; M. Tebbe; A. Hoehn; U. Walter (2016): Aktuelle Herausforderungen in der Stuerung von einem UAV über einen Ka-Band Satellitenlink in einem Feuerwehreinsatz. In: DLRK Braunschweig. Braunschweig, GE.
H. Enke; J. Letschnik; E. Stoll; U. Walter (2014): Satellite Based Search and Rescue Operations Handling using Multi-Sensor UAV. In: IAC GLAC 2014. Paris, FR.


