Deformationsmessung nichtsignalisierter Objekte mittels tachymetrischen Scannings
Autor: Philipp Striegl
Titel: Deformationsmessung nichtsignalisierter Objekte mittels tachymetrischen Scannings
Art: Diplomarbeit
Jahr, Nr.: 2008, #401
Betreuer: Dipl.-Ing. Peter Wasmeier (TU München, LfG)
Aufgabenstellung
Eine Vielzahl von Messungen wird heute nicht mehr auf einzelne, ausgesuchte Punkte durchgeführt, sondern mittels einer großen Anzahl von gerasterten Messwerten wird auf Lage und Form von Objekten rückgerechnet. Diese Vorgehensweise brachten naturgemäß die Laserscanner mit sich; aber auch die Hersteller von Tachymetern rüsten ihre motorisierten, reflektorlos messenden Instrumente zunehmend mit Scan-Funktionalitäten aus. Einer der Bereiche, die bisher noch allein der herkömmlichen Vermessung vorbehalten waren, ist die Deformationsmessung, da bei gescannten Punktwolken keine eindeutige Zuordnung zwischen identischen Punkten unterschiedlicher Epochen möglich ist. Es ist zu untersuchen, inwieweit auch diese Aufgabe durch tachymetrisches Scannen gelöst bzw. unterstützt werden kann.
Für einen Tachymeter TCRP1201 ist ein Programm zur Steuerung des Scannings und zur Erzeugung entsprechender Datenfiles zu entwickeln. Die Steuerung ist in C/C++ zu erstellen. Zum Vergleich unterschiedlicher Epochen ist ein auf dem ICP-Algorithmus basierendes Verfahren zu entwickeln, mit dem die Messungen auch ohne bekannte identische Punkte zueinander in Verbindung gesetzt werden können. Ziel des Verfahrens ist die Ableitung von Transformationsparametern einer Ähnlichkeitsabbildung, welche die Deformationen zwischen den Epochen beschreiben. Zur Verifikation von Programm und Algorithmus sowie der Prüfung der Ergebnisse und Genauigkeiten sollen mehrere praktische Messreihen an Versuchsobjekten durchgeführt und ausgewertet werden.
Kurzfassung
Ein innovatives und Erfolg versprechendes Thema im Bereich der Ingenieurgeodäsie ist die Durchführung von Deformationsmessungen bei nicht signalisierten Objekten. Die Weiterentwicklung der reflektorlosen Distanzmessung bei tachymetrischen Messinstrumenten, sowie der Durchbruch der 3D-Laserscanner im geodätischen Arbeitsumfeld sind Anzeichen eines zukünftigen Trends bezüglich dafür geeigneter Messsysteme.
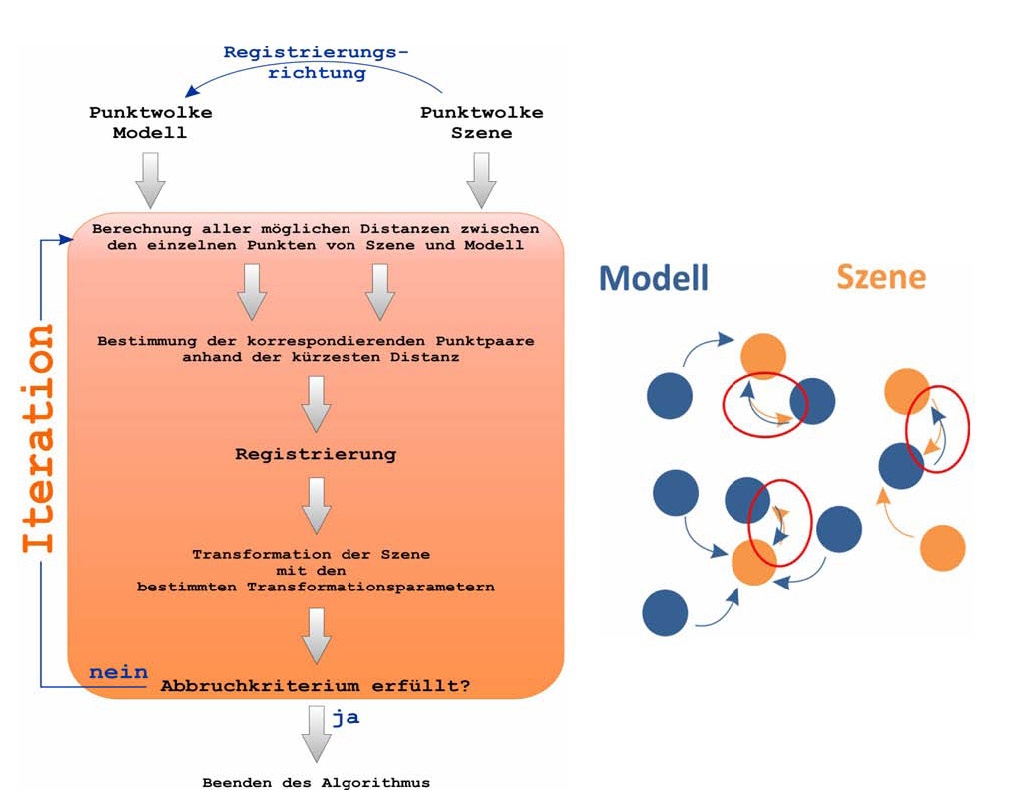
Im Bereich von Deformationsanalysen nicht signalisierter Objekte, muss das Fehlen aussagekräftiger Punkte durch eine große Anzahl von Messungen der Objektoberfläche ausgeglichen werden. Diese massenhafte Aufnahme von Oberflächenpunkten kann beispielsweise durch das Abtasten des Objekts mit Hilfe eines Tachymeters nach einem vordefinierten Gitter erfolgen. Um die gemessenen Datensätze bezüglich einer auftretenden Deformation auswerten zu können, benötigt man einen Algorithmus, der einen geometrischen Vergleich zwischen zwei unabhängigen Datensätzen durchführt: den sogenannten Iterative Closest Point Algorithmus (ICP). Diese Arbeit beschäftigt sich mit dem kompletten Vorgang der Deformationsanalyse, von der Datenerfassung bis hin zur Auswertung mittels des ICP.