HELIOP - Helicopter Shipdeck Operations

Operating helicopter from sea-based platforms is a challenging endeavor due to different factors, like influence of the landing zone on pilot performance, limited field of view during landing maneuver, and degraded visual environment (DVE). To localize the moving restricted landing area and approach safe, pilots have to compensate ship motion in all axes and heave motions of the landing area, as well as ship forward speed and recirculating ship airwake. Different characteristics of Helicopter Shipdeck Operations (HELIOP) are under exploration at the Institute of Helicopter Technology due to different topics of visual and control augmentation.
Therefor different phases of flight during helicopter ship deck operations are analyzed and structured. Needed parameters to the pilot flying during phases of navigation, descent, hover behind deck and landing are presented in a tailored real-time augmentation design via a helmet-mounted display for the eyes-of-of-the-cockpit task according to implemented real ship data. To localize the restricted landing area and approach safe, pilots have to compensate ship motion in pitch, roll, and yaw and heave motions of the landing area, as well as ship forward speed and recirculating ship air wake. The configurable restricted landing area necessitates precise maneuvering to avoid nearby structures of the ship. Existing systems for visual aids in maritime operations such as floodlighting, deck markings, fixed horizon bar, glide path indicator, quiescent period predictor, landing point designator, and hover and approach positioning system deal with different challenges due to not interfere with other instrumentation or overload the pilot with information.
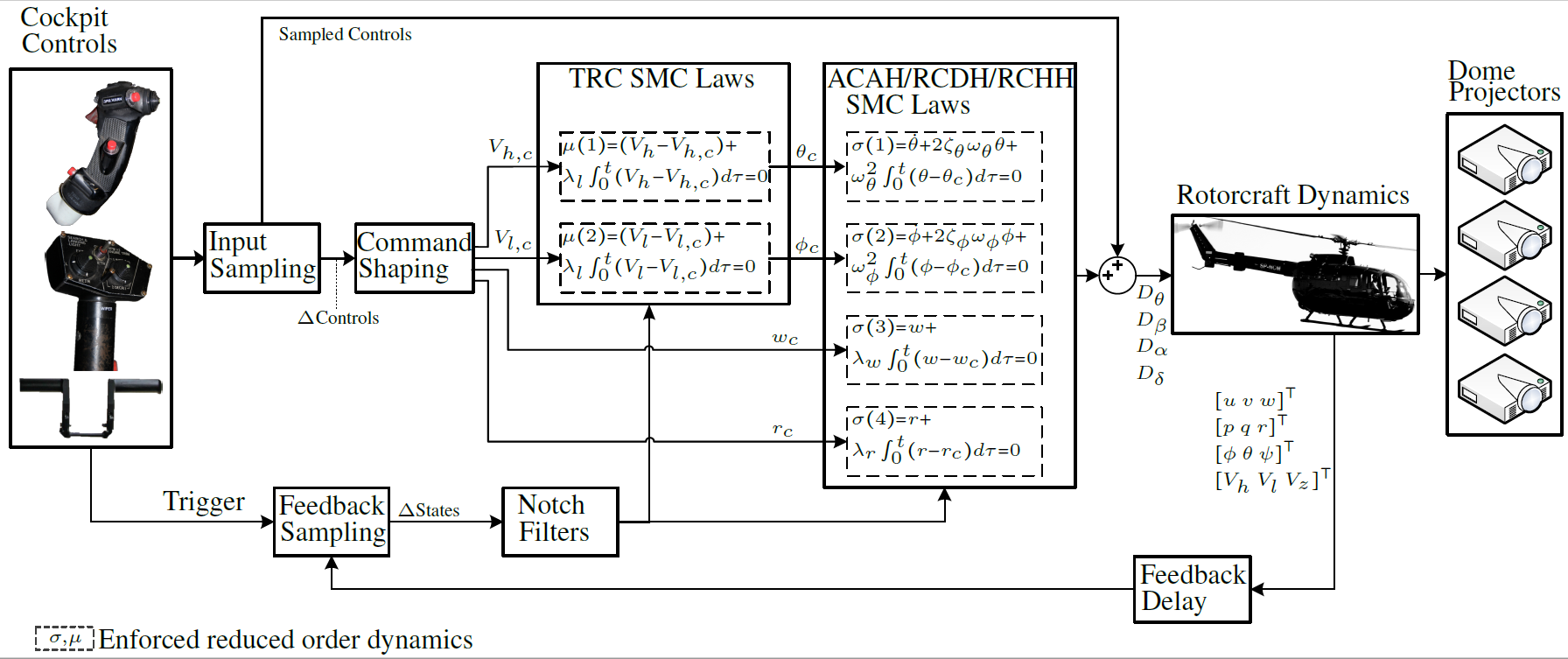
The cockpit setup includes the conventional pilot controls: a centre stick, a collective lever, and foot pedals. The center stick includes a force trim system and allows the pilot to change the detent position using beep switches. The collective stick and pedals, however, do not include a force trim. Two advanced response-types are offered for the ground translations: translational rate command with position hold (TRC/PH) and acceleration command/velocity hold (ACVH). The yaw axis offers a (yaw) rate command, direction hold (RCDH) response-type, whereas the collective axis offers a (vertical) rate, height hold (RCHH) response type.For the TRC response-type, pilot commands on the cyclic stick are mapped to commanded translational rates in the local frame, whereas for the ACVH response-type, pilot commands on the cyclic stick are mapped to commanded translational accelerations in the local frame. Collectively, these responses reduce piloting to an essentially steering task, without the pilot having to worry about the stabilization or coupling compensation. The control laws are implemented using the robust sliding mode control (SMC) technique. SMC is particularly well-known for its guaranteed finite-time convergence, accuracy, and insensitivity to a class of uncertainties. The SMC-based flight controller not only enforces the desired set of lower order dynamics (shown in dashed boxes), but is also robust to model and parametric uncertainties in the system identification process. The nonlinear rotorcraft dynamics are simulated by a real-time capable software package GenSim, which is a comprehensive code for global steady and unsteady performance, flight mechanics, loads calculations, and flight simulations.
Detailed requirements for a safe ship deck landing leading to an augmentation design for helicopter ship deck operations will end up in a HMD augmentation design for an „image of the outside world“ how the pilots prefer for naval operations. Furthermore, to face the demand of a Pilot Assistance System (PAS) including instrumentation to the main faces of the helicopter ship deck operations, the PAS concept includes a matrix of head-down (PFD) and head-up instrumentation (HMD) fitted to the pilot needs and to generally enhance the flight safety. Fulfilling helicopter ship deck operations safe with the assistance of the Pilot Assistance System are consolidated to certification and reliability.

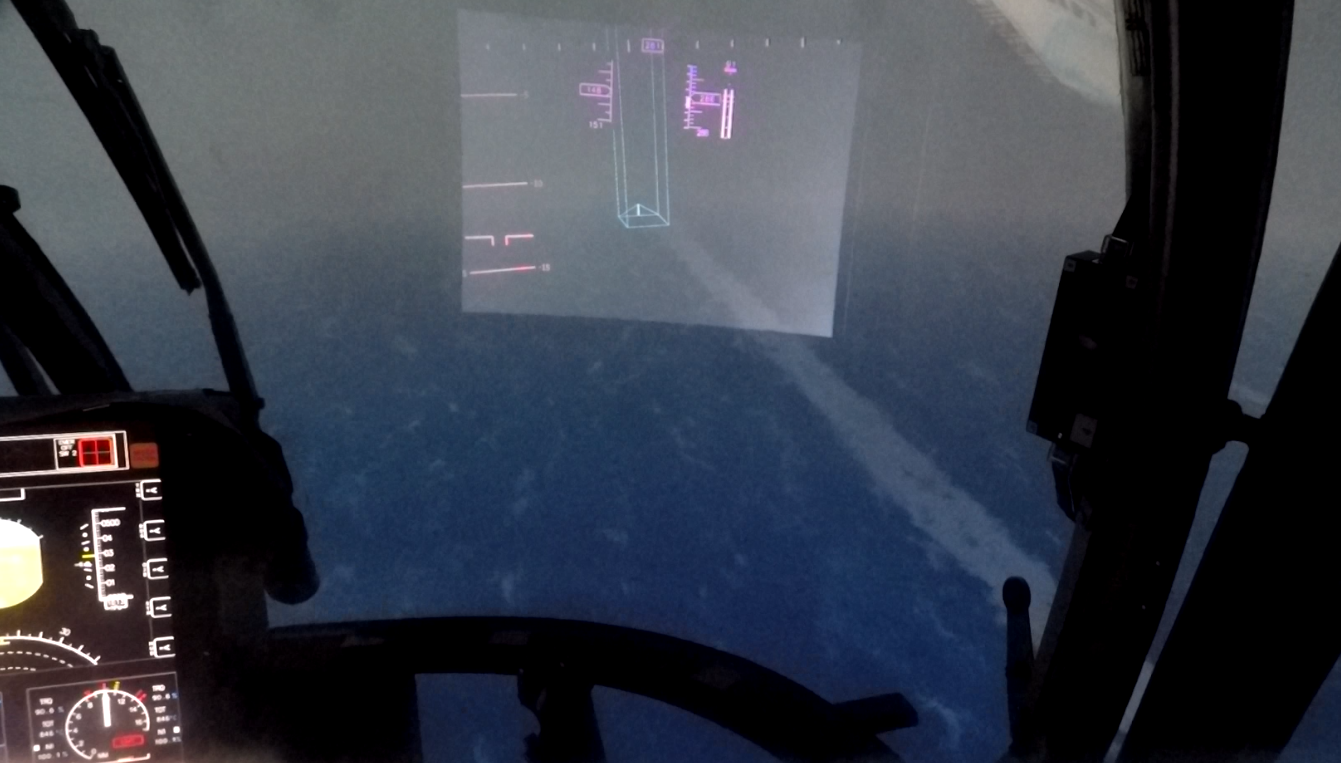
Additional multimodal cueing technologies such as tactile and 3D audio systems could have the ability to further enhance situational and obstacle awareness by addressing several sensory organs of the pilot. New sensor imaging technologies visualize realistic synthetic outside views on the HMD that may allow onshore as well as offshore helicopter operations with a synthetic panoramic view for fight guidance, named as Pilot Vision System 360° (PVS360). The PVS360 had been integrated to the ROSIE pilot-in-the-loop rotorcraft simulator beyond enhanced visual and control augmentation for investigating onshore as well as offshore rotorcraft operations, especially in DVE conditions, and in the context of Manned-Unmanned Teaming (MUM-T).
The HMD synthetic visual augmentation integrates enhanced HMD visual augmentation concepts from the PAS, an integrated sensor view, and picture-in-picture designs for next generation rotorcrafts operations. Finally, automated helicopter operations with enhanced control augmentations open doors to research fields such as hardware-in-the-loop investigations together with pilot-in-the-loop simulations on top.
Interviews, press releases, and video of simulated rotorcraft flights using the Pilot Assistance System in the maritime environment

Mehr Informationen