Contact: Nicolas Zunhammer, Maximilian Prexl
In addition to a functioning communication architecture, it is essential in the CopKa project that the dispatcher can easily control the UAV during deployment. For this purpose, the dispatcher must be able to operate the aircraft intuitively and without lengthy training and be able to process information quickly. It is necessary to investigate the interaction between the capabilities of the UAV, the latency of the communication link and the HMI in the control center. To this end, new operating peripherals such as a commercially available VR system (HTC Vive) and the use of two monitors with a space mouse for simpler operation were investigated in several studies.

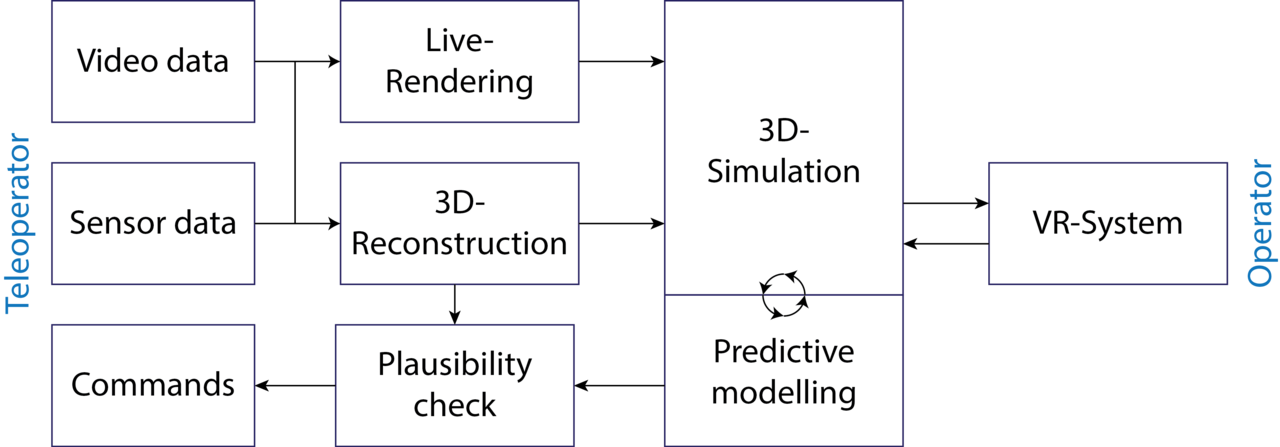
In addition to the new peripherals, new methods are also used to facilitate teleoperation. These include real-time 3D reconstruction to increase the dispatcher's situational awareness. The resulting 3D reconstruction can then be used to pre-calculate the trajectory of the UAV to prevent early collisions by the operator. The work focuses on the research of suitable reconstruction algorithms in real time and the development of a robust and efficient predictive conflict handling in order to intercept collisions or unauthorized movements.