Interoperability of GPS L2C and GLONASS Observations for RTK Positioning Applications
Autor: Ulf Glückert
Titel: Interoperability of GPS L2C and GLONASS Observations for RTK Positioning Applications
Art: Diplomarbeit
Jahr, Nr.: 2009, #403
Betreuer: Prof. Thomas A. Wunderlich (TU München, LFG), Frank Takac (Leica Geosystems AG)
Kurzfassung
Während der letzten Jahre gab es wesentliche Veränderungen bei den zwei Globalen Satelliten Navigations Systemen (GNSS), die momentan Navigationssignale an zivile Nutzer aussenden. Konsequenterweise kamen bei den Benutzern Interoperabilitätsfragen auf.
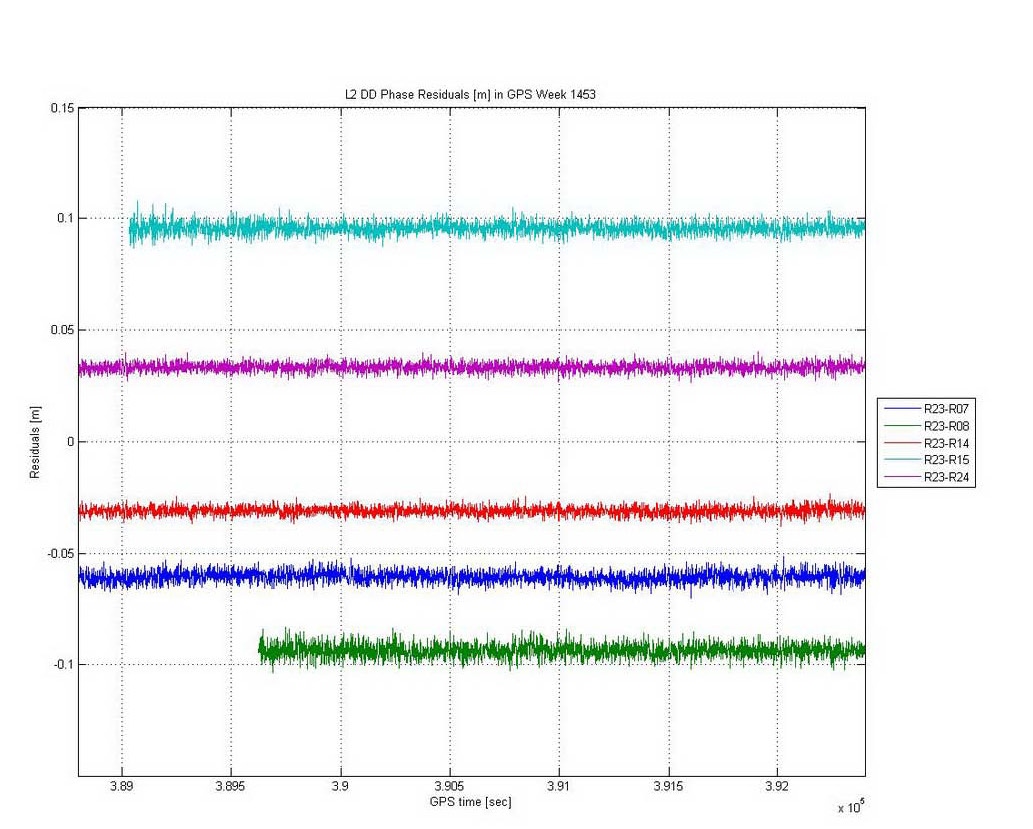
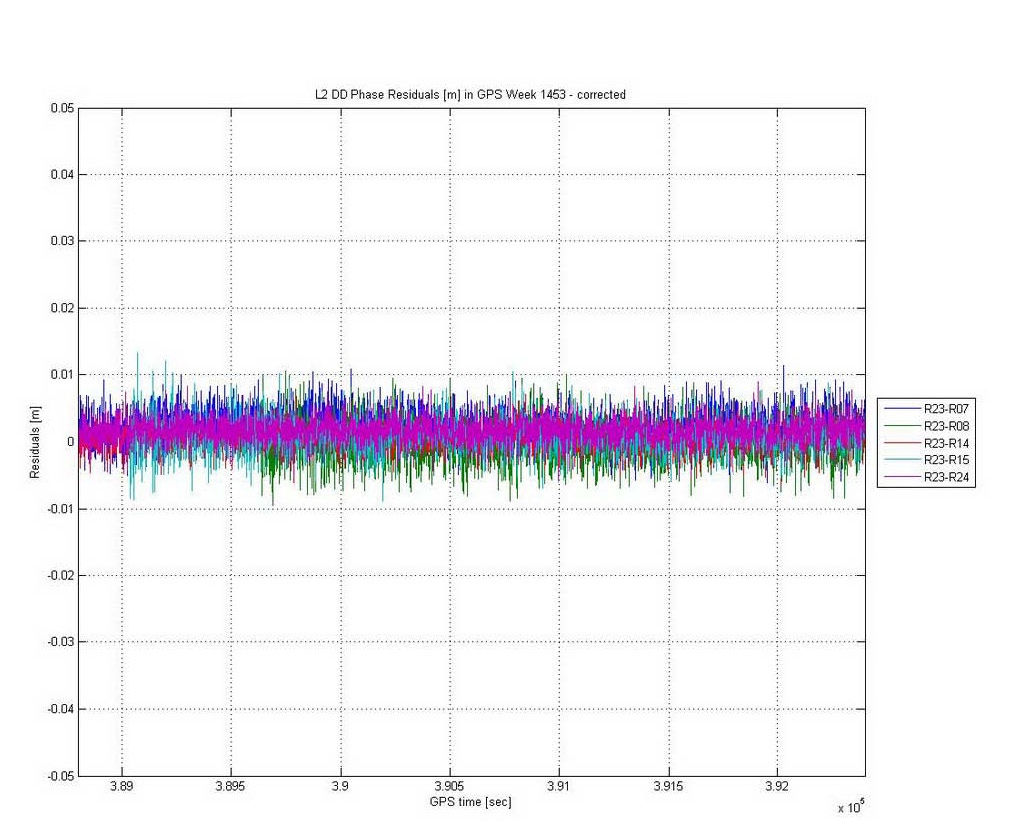
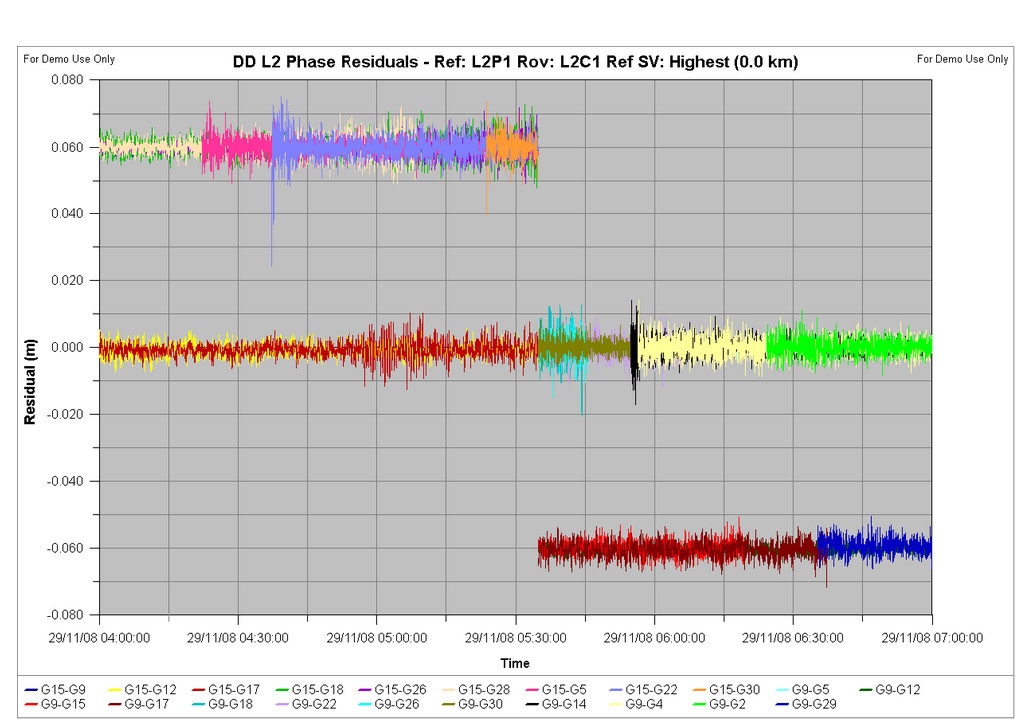
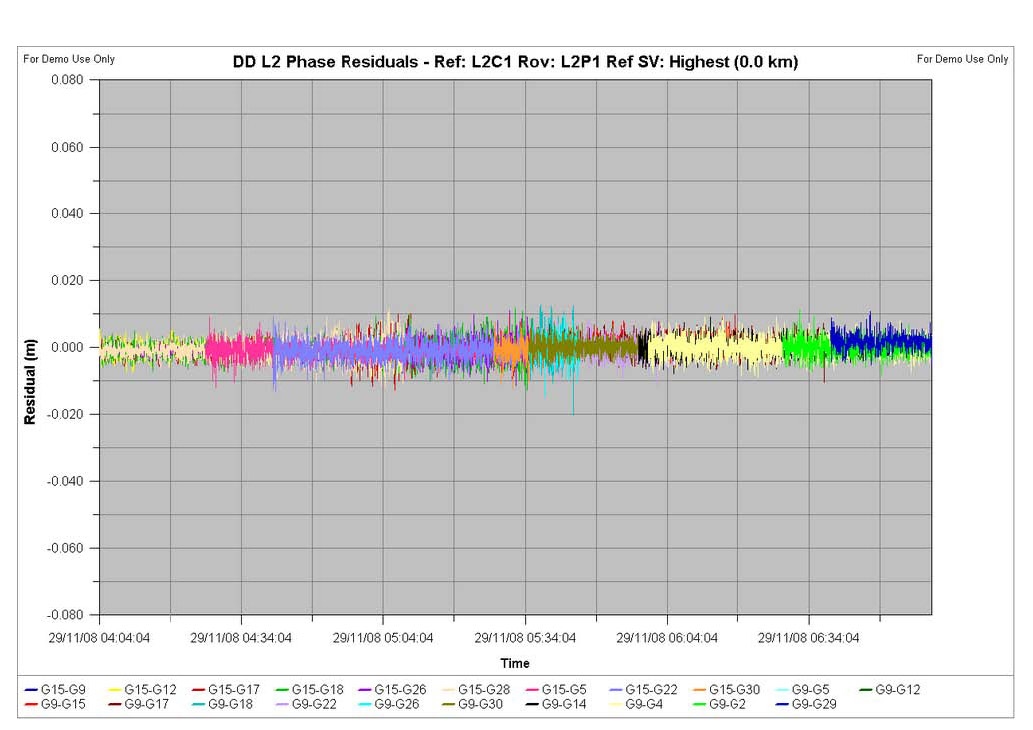
Infolge des Global Positioning System (GPS) Modernisierungsprogramms wurde 2005 ein zweites ziviles Signal auf L2 (L2C) in Betrieb genommen. Seit März 2008 sind sechs L2C fähige Satelliten operationell. Da die L2 Phasenmessungen eine Mischung aus L2C und L2P(Y) Signalen enthalten können ist auf Interoperabilität auf dem Gebiet der Messgrössen zu achten. Ein systematischer Unterschied zwischen GPS L2C und L2P(Y) Beobachtungen wurde unter Verwendung zweier baugleicher Empfänger entdeckt.
Real-Time-Kinematic (RTK) ist eine der wichtigsten Anwendungen für präzise GNSS Positionierung. Viele führende Hersteller haben in den letzten Jahren kombinierte GPS/GLONASS Empfänger auf dem Markt eingeführt. Zusätzlich ist die Anzahl der verfügbaren GLONASS Satelliten angestiegen. Es ist zu erwarten, dass dies der Zukunftstendenz entspricht. Diese zwei treibenden Faktoren lassen die Nachfrage nach einer Kombination von GPS und GLONASS in einem Empfänger anwachsen. Jedoch wurden beim Prozessieren von GLONASS Beobachtungen, welche aus Empfängern unterschiedlicher Hersteller stammen, signifikante systematische frequenzabhängige Signalverzögerungsdifferenzen festgestellt.
GLONASS Doppel-Differenz Phasenbeobachtungen enthalten einen zusätzlichen Einfach- Differenz Mehrdeutigkeitsterm, der besonders bei der Verwendung von Empfängern unterschiedlicher Hersteller auf Referenz- und Roverseite die Eigenschaft der ganzzahligen Mehrdeutigkeiten zerstört. Dieser Term kann mit Hilfe der Einfach-Differenz Trägerphasen- und Codebeobachtungen geschätzt werden. Allerdings ist diese Abschätzung aufgrund inkonsistenter systematischer Fehler in den Code- und Trägerphasenbeobachtungen fehleranfällig. Dieser systematische Fehler spiegelt sich in den Doppel-Differenz Phasenbeobachtungen als so genannte frequenzabhängige Signalverzögerungsdifferenz wieder, welche bei Nichtberücksichtigung v.a. in RTK-Anwendungen GLONASS Interoperabilität zwischen heterogenen Empfängern unterbindet.
Diese Forschungsarbeit behandelt die Interoperabilität zwischen GPS L2C und L2P(Y) Beobachtungen baugleicher GPS Empfänger sowie GLONASS Beobachtungen unterschiedlicher GLONASS Empfängertypen für Applikationen der RTK-Positionierung auf dem Gebiet der Messgrössen. Es wird gezeigt, dass für Leica Empfänger ein konstanter systematischer Fehler zwischen GPS L2C und L2P(Y) Trägerphasenbeobachtungen in der Grössenordnung einer viertel L2 Wellenlänge existiert. Dieser systematische Fehler kann kalibriert und dadurch a priori in der Positionslösung entfernt werden um Interoperabilität für GPS L2C und L2P(Y) Beobachtungen zu erlangen. Zusätzlich wird gezeigt, dass es keine signifikanten frequenzabhängigen Signalverzögerungsdifferenzen für GLONASS Trägerphasenbeobachtungen gibt. Die vorhandenen frequenzabhängigen Signalverzögerungsdifferenzen entstammen hingegen dem Abschätzungsfehler der Einfach-Differenz Mehrdeutdigkeit aufgrund inkonsistenter systematischer Fehler in den Code- und Trägerphasenbeobachtungen. Diese konstanten frequenzabhängigen Signalverzögerungsdifferenzen können kalibriert und dadurch a priori in der Code-Messung entfernt werden um Interoperabilität für eine Kombination verschiedenartiger GLONASS Empfänger zu erlangen.