Aufbau eines Mobile Mapping Systemes

Autor: Wolfgang Wiedemann, B.Sc.
Titel: Aufbau eines Mobile Mapping Systemes
Art: Master's Thesis
Jahr, Nr.: 2013, #417
Betreuer: Dipl.-Ing. Johannes Ohlmann-Lauber, Dipl.-Ing. Christian Ackermann
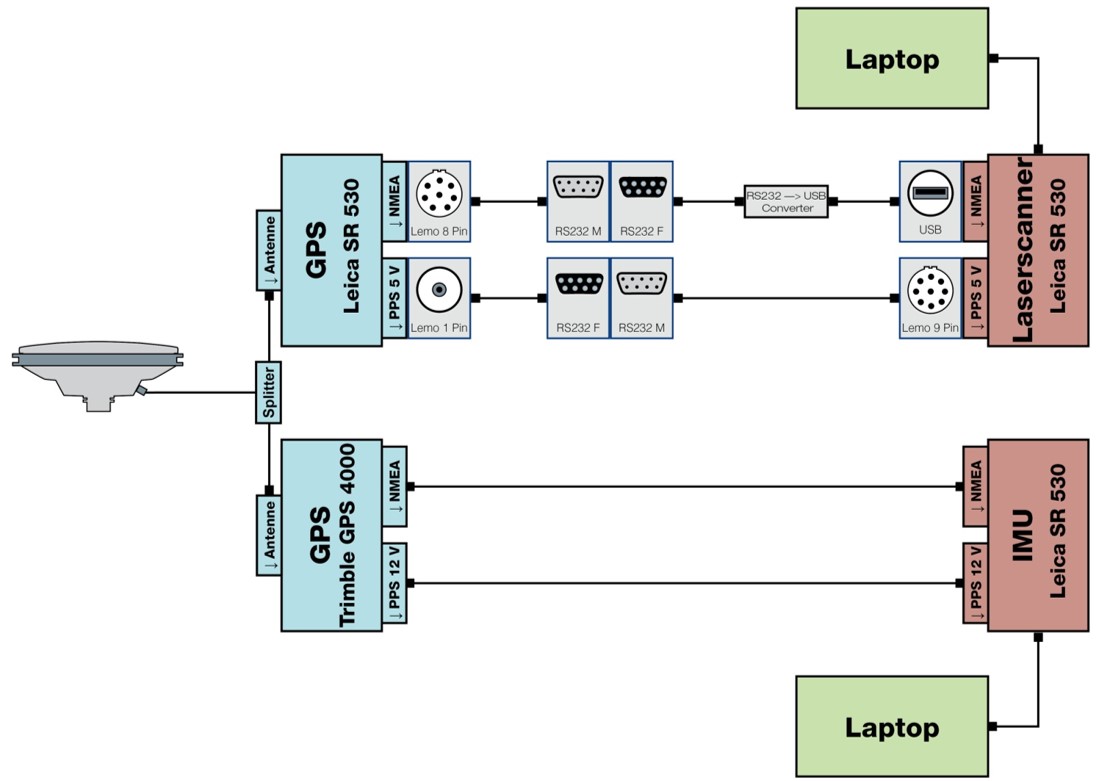
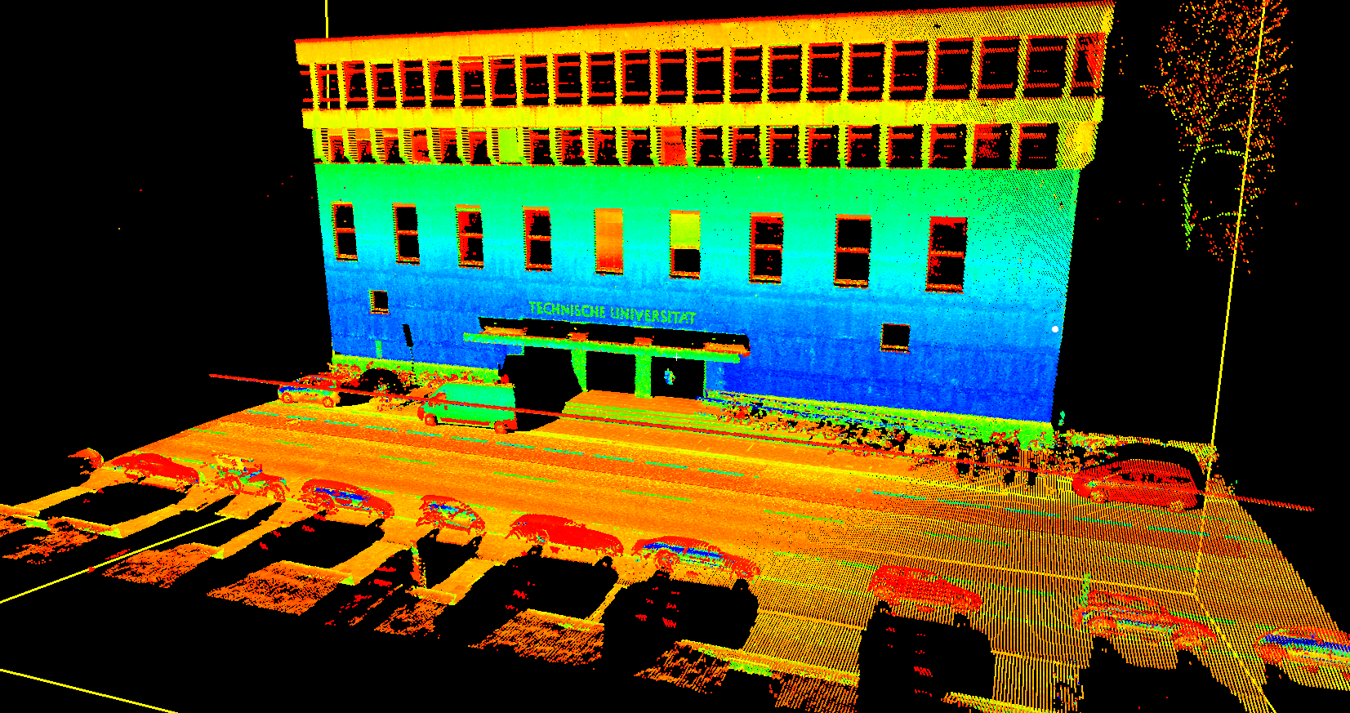
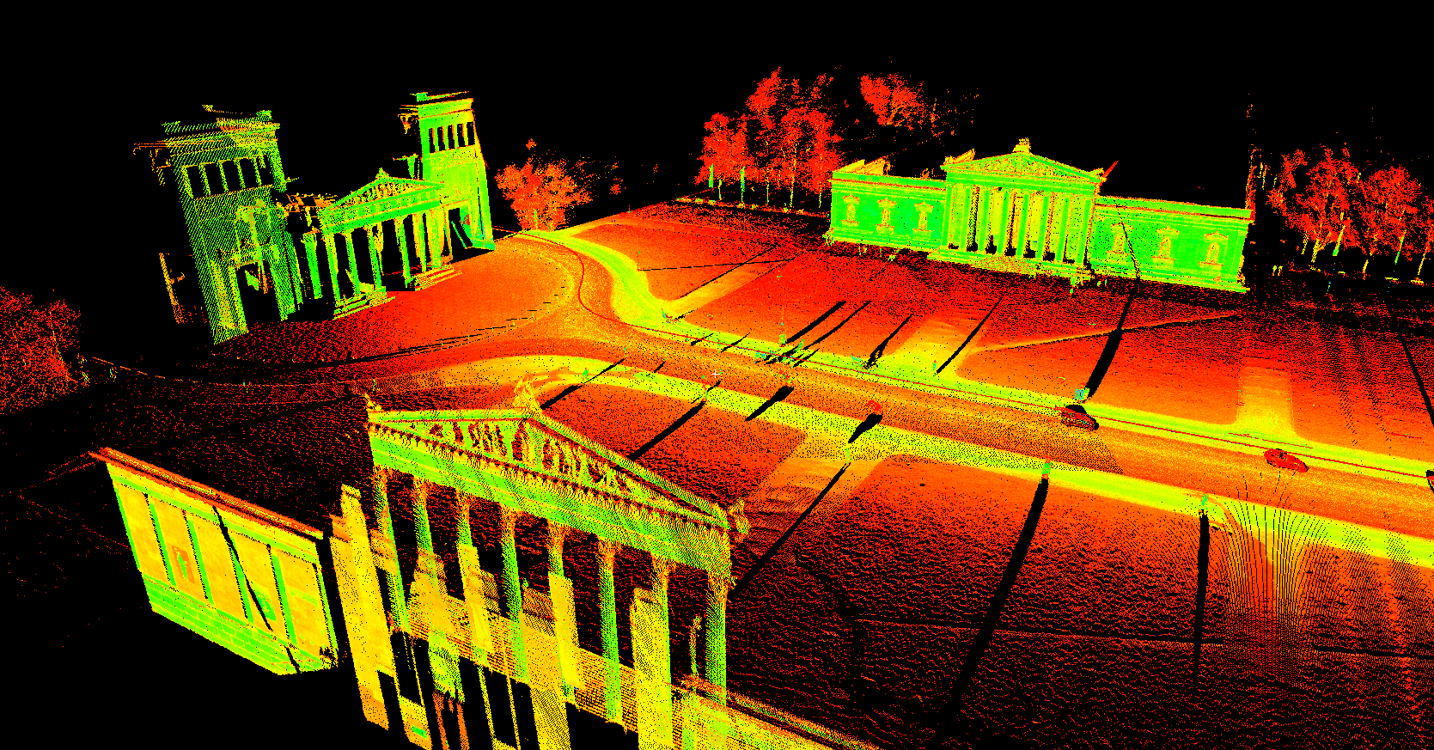
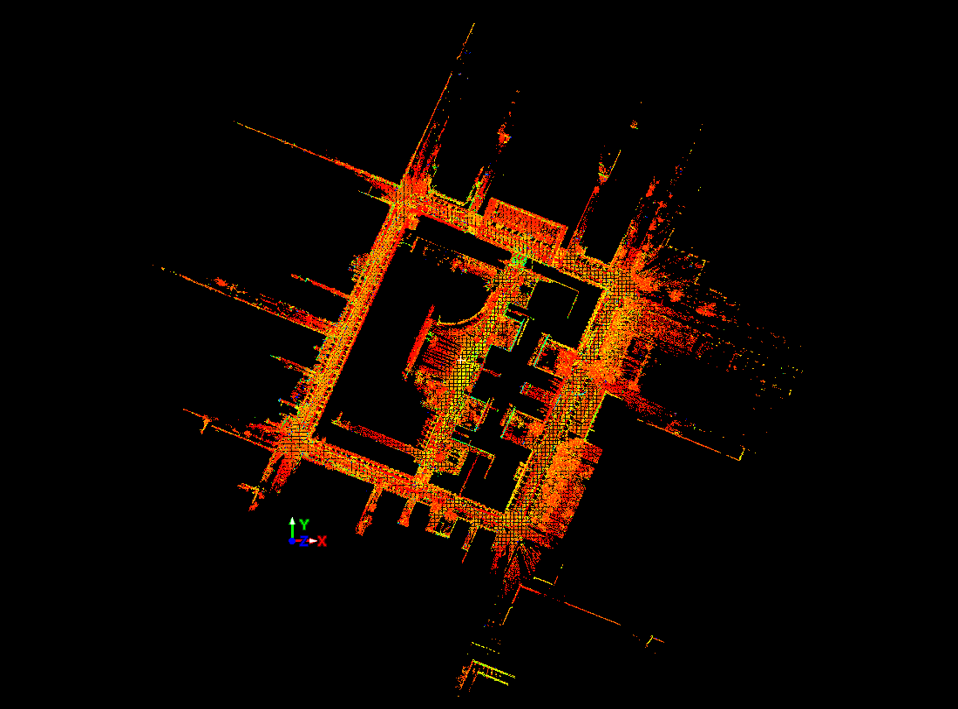
Im Rahmen dieser institutsübergreifenden Masterarbeit am Lehrstuhl für Geodäsie und am Institut für Astronomische und Physikalische Geodäsie wird ein Mobile Mapping System (MMS) entwickelt. Dafür werden bereits vorhandene Sensoren der betreuenden Lehrstühle verwendet. Das modular aufgebaute MMS erfasst dabei die Messumgebung mit Hilfe eines Laserscanners. Für die Positionierung und Orientierung des MMS werden differentielle GPS-Messungen und Daten eines Inertialnavigationssystemes (INS) kombiniert. Als Trägerfahrzeug dient ein PKW. Die Arbeit beinhaltet die grundlegenden Prozessierungsschritte und den dazugehörigen Programmcode, um von den aufgezeichneten Sensordaten zu einer georeferenzierten Punktwolke zu gelangen. Es wird eine Methode entwickelt, mit der sich die Kalibrierparameter bestimmen lassen, die für eine Georeferenzierung nötig sind. Diese Kalibrierparameter beschreiben die relative Lage und Orientierung der Sensoren auf einer Trägerplatte. Für die Kalibrierung wird das System auf einer Führungsschiene installiert, die ein geradliniges Bewegen des MMS ermöglicht. Aus den bei der Bewegung aufgezeichneten Messdaten lassen sich die Kalibrierparameter zwischen Scanner und INS ableiten. Die Bestimmung der relativen Position der GPS-Antenne zum INS erfolgt mit Hilfe eines Lasertrackers. Die Zeitsynchronisation zwischen den Sensoren wird über GPS-Zeitsignale realisiert. Bei einer Probemessung wurde das System auf seine Praxistauglichkeit geprüft. Die erzielten Messergebnisse bestätigen die gewonnenen Kalibrierparameter und die Funktionalität des MMS.