Lokalisation und Navigation einer Roboterplattform
Autor: Murat Akif, B.Sc.
Titel: Lokalisation und Navigation einer Roboterplattform
Art: Master's Thesis
Jahr, Nr.: 2016, #436
Betreuer: Dr.-Ing. Andreas Wagner, M.Sc. Wolfgang Wiedemann
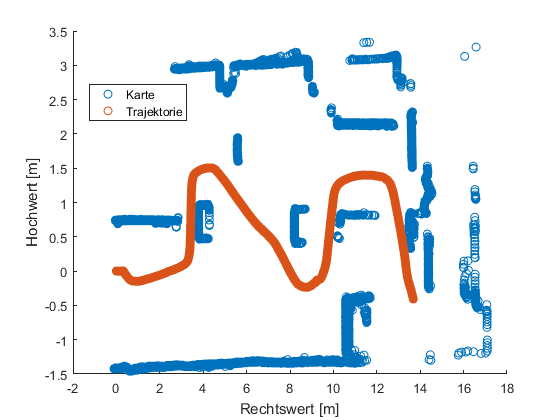
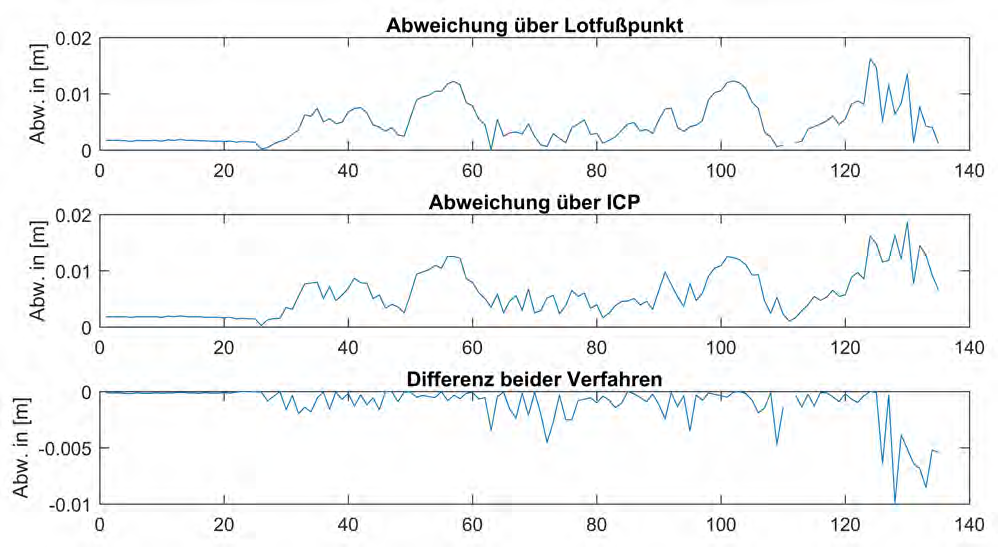
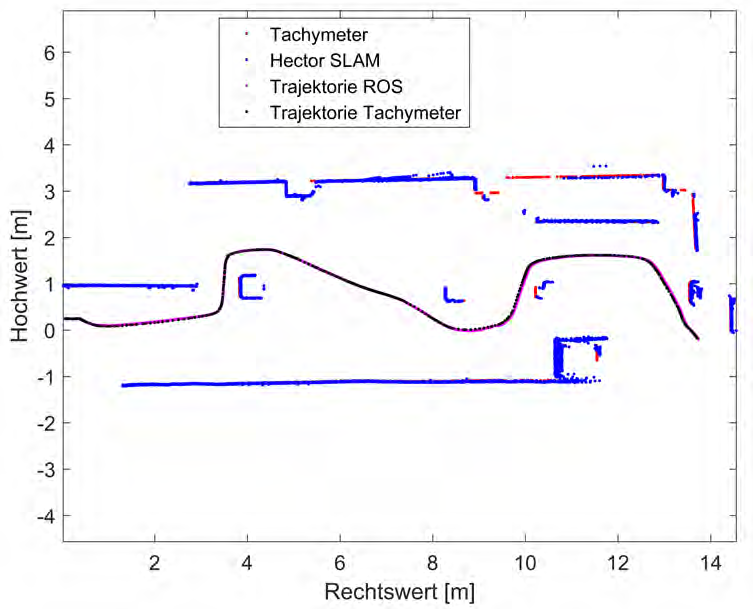
Die Vermessung mit einem Tachymeter oder einem Laserscanner benötigt einen festen Standpunkt. Häufig kann das aufzunehmende Objekt nicht von einem Standpunkt aus erfasst werden. Das führt dazu, dass mehrere Standpunkte benötigt werden. Dadurch wird mehr Zeit benötigt und ebenso muss mehr Aufwand betrieben werden. Simultaneous Localization and Mapping (SLAM)-Algorithmen aus der Robotik können Position und Orientierung des Instrumentes in Echtzeit bestimmen und währenddessen die Umgebung kartieren. In dieser Arbeit wird ein SLAM mit einem Profilscanner untersucht. Ziel der Untersuchung ist es, die Genauigkeiten des SLAM zu ermitteln. Dazu werden mehrere Versuche durchgeführt, in der die Trajektorie des SLAM näher betrachtet wird. Als Vergleichswerte werden die Trajektorien mit einem Tachymeter verfolgt. Durch die Registrierung beider Punktwolken mittels eines Iterative Closest Point (ICP) werden die beiden Trajektorien übereinander gelegt. Das Qualitätsmaß der Genauigkeit der Trajektorie ist dabei die Abweichung beider Trajektorien. Im Rahmen der Arbeit wird ein Algorithmus entwickelt, das die Umrechnung eines Occupancy Grid Map, einer Karte aus binärem Gitter, in metrische Koordinaten ermöglicht. Die Versuchsumgebung wird tachymetrisch erfasst. Die Karte aus dem SLAM und der tachymetrischen Messung werden verwendet, um Transformationsparameter für die Transformation der Trajektorie zu erhalten. Damit wird die Lage und Genauigkeit der Trajektorie im Raum untersucht. Zusätzlich wurde in dieser Arbeit die Motorensteuerung und die Positionsbestimmung durch Odometrie der mobilen Plattform implementiert. Entwicklungsumgebung für die mobile Plattform ist das Roboter Operating System (ROS). Für die Motorensteuerung wird ein Programm in C++ entwickelt, welches Befehle aus Paketen von ROS entgegen nehmen kann. Zur Bestimmung der Position werden die Encoder der mobilen Plattform verwendet und ebenfalls kompatibel für ROS gemacht. Aufgrund von Hardware Defekten, die zu mehreren Reparaturen führten und damit etwa zwei Monate in Anspruch nahmen, konnte die Implementierung nicht vollständig fertig gestellt und überprüft werden.