r:trån- OpenDRIVE zu CityGML converter

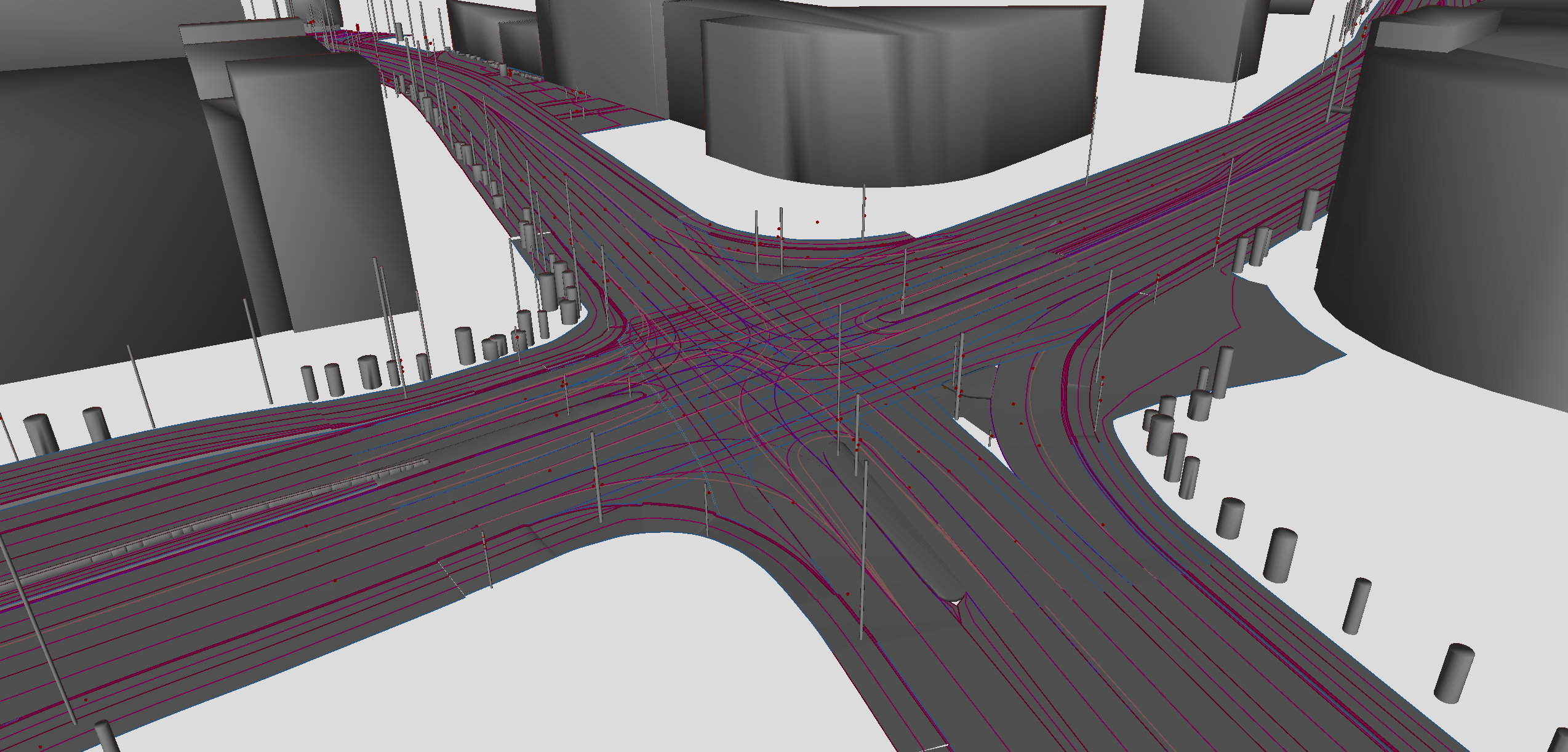
Zum Testen von automatisierten Fahrfunktionen werden hochdetaillierte Referenzkarten erstellt und im Straßennetzstandard OpenDRIVE beschrieben. Da OpenDRIVE für den sehr speziellen Anwendungsbereich der Fahrzeugsimulation entwickelt wurde, ist die Toolunterstützung innerhalb des GIS-Bereichs eher begrenzt.
Um diese Lücke zu schließen, hat der Lehrstuhl für Geoinformatik den Straßenraumtransformator r:trån auf GitHub veröffentlicht. Das Open-Source-Projekt konvertiert verfügbare OpenDRIVE-Datensätze in den virtuellen 3D-Stadtmodell-Standard CityGML.
Die duale Repräsentation ermöglicht die Verwendung von OpenDRIVE-Datensätzen innerhalb etablierter GIS-Tools wie der 3DCityDB, QGIS und FME. Weitere Demos und Anwendungsbeispiele können auf der Projekt-Website https://rtron.io gefunden werden. Das Projekt wurde im Rahmen des öffentlich geförderten Forschungsprojektes SAVe entwickelt, welches von der AUDI AG geführt wird und mehrere Partner aus Industrie, Forschung und öffentlicher Verwaltung zusammenbringt.