Offene Daten
Auf dieser Seite finden Sie Links zu offenen Daten, die am Lehrstuhl für Geoinformatik erstellt oder weiterverabeitet wurden und zum Download bereitstehen.
Semantisches 3D-Stadtmodell von New York City
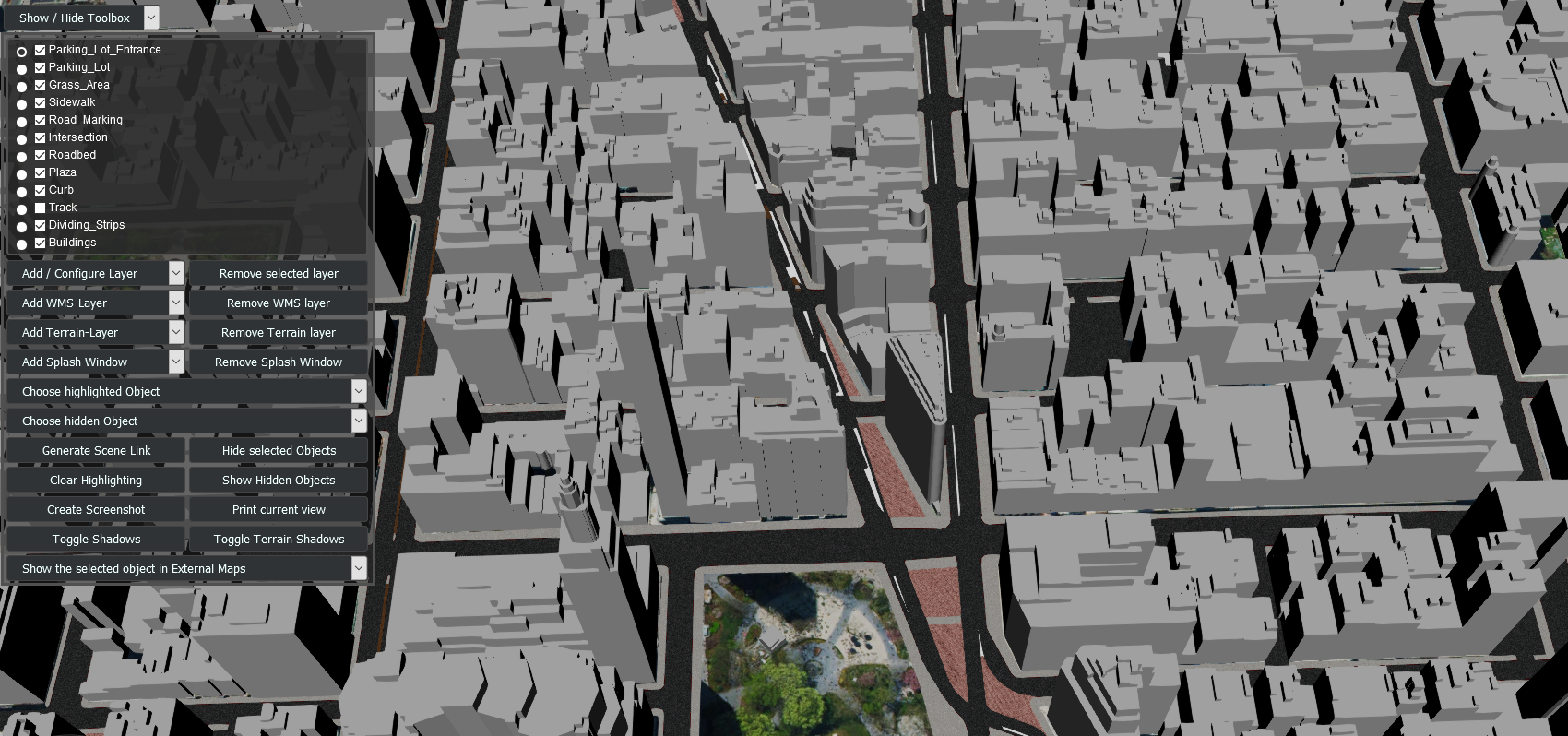
Hier finden Sie eine Download-Möglichkeit für Daten eines Stadt- und Straßenraummodells für die gesamte Stadt New York City im CityGML-Format. Dies beinhaltet über 500'00 Einzelobjekte für Fahrbahnen, Gehsteige, Parkplätze, Plätze u.v.m. Weitergehende Informationen zum semantischen 3D-Stadtmodell von New York City finden Sie auf der zugehörigen Projektseite.
Semantisches 3D-Stadtmodell von Tokio
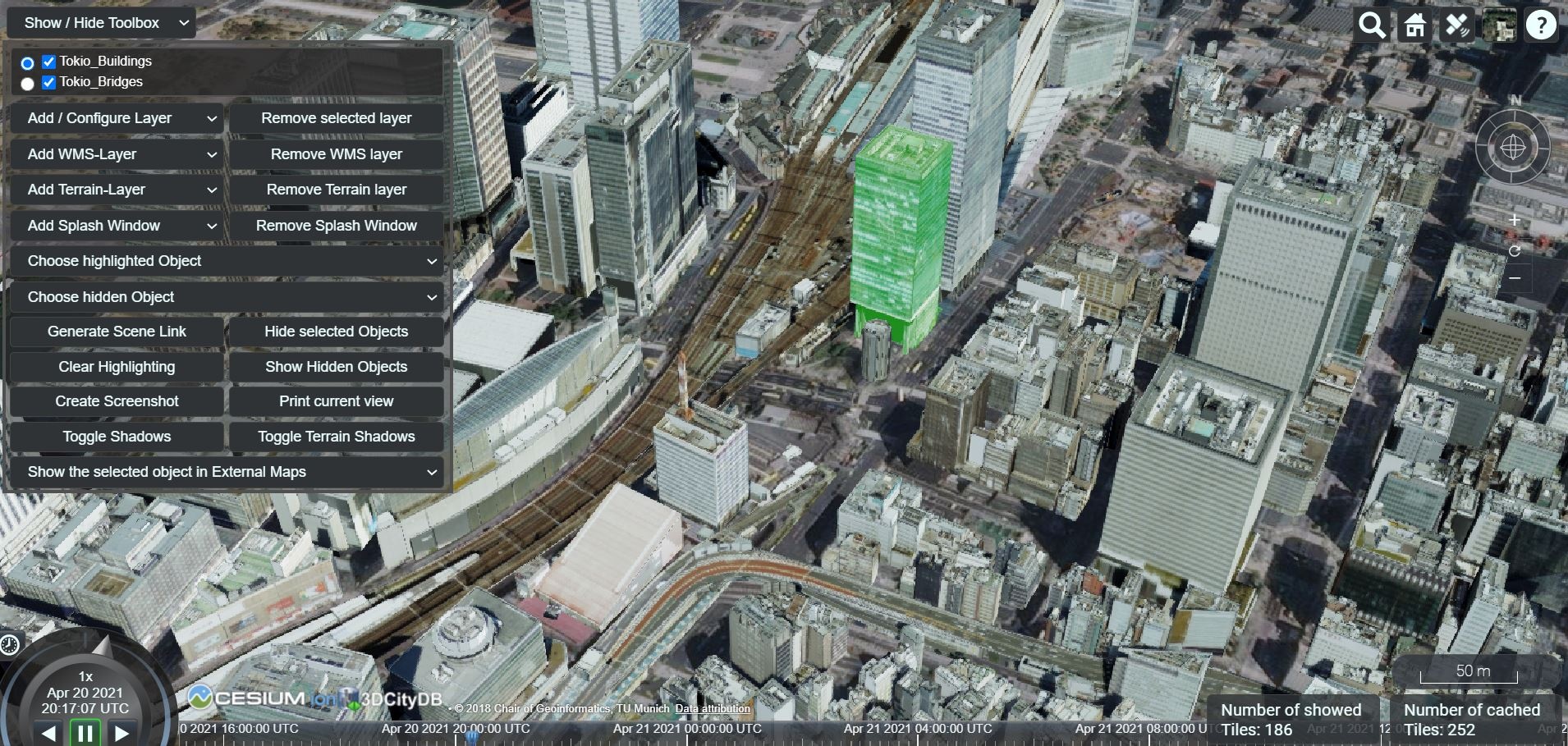
Hier finden Sie eine Download-Möglichkeit für Daten eines semantischen 3D-Stadtmodells von Tokio im CityGML-Format. Weitergehende Informationen finden Sie auf der zugehörigen Wiki-Seite.
LOD3-Gebäudemodelle in Ingolstadt

Hier finden Sie eine Download-Möglichkeit für LOD3-Gebäudemodelle in Ingolstadt. Die 50 Modelle liegen im CityGML-Format vor und wurden manuell aus Punktwolken-Befahrungsdaten (relative Genauigkeit 1-3 cm) abgeleitet. Die Befahrungsdaten wurden durch 3D-Mapping-Solutions GmbH bereigestellt. Weitere Informationen finden Sie auf der zugehörigen GitHub-Seite.
TrueCity: Reale und simulierte urbane Daten für domänenübergreifendes 3D-Szenenverständnis

Der TrueCity-Datensatz umfasst real gemessene und simulierte Punktwolken derselben Umgebung in Ingolstadt. Die vermessenen Punktwolken wurden von der Firma 3D Mapping Solutions GmbH bereitgestellt und im Rahmen des TUM Data Innovation Labs sowie von Prabin Gyawali annotiert. Ergänzend dazu wurde mithilfe des Fahrsimulators CARLA die Fahrt sowie der LiDAR-Sensor in einem semantischen Modell der Ingolstädter Umgebung resimuliert. Der Benchmark-Datensatz sowie die Untersuchung der Auswirkungen verschiedener real-synthetischer Mischverhältnisse auf Methoden zur semantischen Segmentierung von Punktwolken wurden auf der International Conference on 3D Vision 2026 vorgestellt. Der zugehörige Artikel ist über MediaTUM erhältlich.
TUM2TWIN

Im Rahmen der TUM2TWIN-Initiative werden hochpräzise, georeferenzierte 3D-Repräsentationen des TUM-Campus erstellt und aktualisiert. Dazu gehören Punktwolken, Bilder, das Straßennetzwerk in OpenDRIVE sowie semantische 3D-Gebäude und Straßenraummodelle in CityGML, die alle als Open Data über die Website bereitgestellt werden. Die LOD3-Gebäudemodelle können hier bezogen werden, das aus OpenDRIVE konvertierte Straßennetzmodell ist hier verfügbar. Eine detaillierte Beschreibung ist in dem TUM2TWIN-Artikel zu finden, der im ISPRS Journal of Photogrammetry and Remote Sensing veröffentlicht wurde.