- Development of an Automated Transformation Method of GB Road Network Data for Connected and Automated Mobility Applications. Master thesis, 2023 more… BibTeX
- Validation of Parametric OpenDRIVE Road Space Models. Proceedings of the 17th International 3D GeoInfo Conference 2022 (ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences), 2022 more… BibTeX
- Identifikation von geometrischen Abweichungen zwischen semantischen Stadtmodellen und Punktwolken. Bachelor thesis, 2021 more… BibTeX
- Plastic Surgery for 3D City Models: A Pipeline for Automatic Geometry Refinement and Semantic Enrichment. ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Copernicus GmbH, 2021ISPRS Congress 2021, 17-24 more… BibTeX
- Spatio-Semantic Road Space Modeling for Vehicle–Pedestrian Simulation to Test Automated Driving Systems. Sustainability 12 (9), 2020, 3799 more… BibTeX
- Semantic-based Geometry Refinement of 3D City Models for Testing Automated Driving. Master thesis, 2020 more… BibTeX
- Requirement Analysis of 3D Road Space Models for Automated Driving. ISPRS Annals of Photogrammetry, Remote Sensing and Spatial Information Sciences IV-4/W8, 2019, 99-106 more… BibTeX
SAVeNoW – Functional and traffic safety for automated and connected mobility – Benefits for society and ecological effects

The SAVeNoW project explores the development and deployment of a digital twin based on the example of Ingolstadt and its surroundings. Here, the virtual model includes static elements (buildings, road space, traffic infrastructure and rules), dynamic elements (vehicles, VRUs) as well as environmental conditions (weather). On the basis of the developed digital twin, interdisciplinary questions can be investigated, whereby the focus lies on the domain of functional and traffic safety for automated and connected driving.
Project description
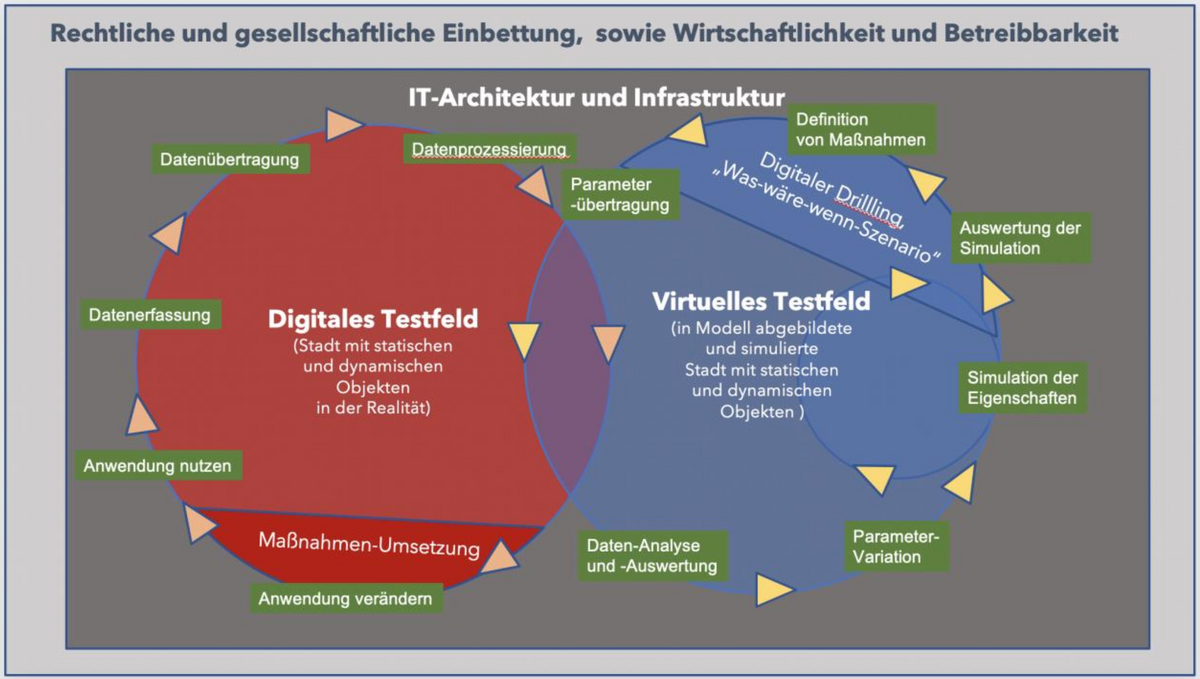
The objective of SAVeNoW is to research, develop and test the digital twin by means of two interacting control loops (see Figure). The digital test field represents the real city, which is transferred into a virtual model by means of surveying campagins, floating car data and IoT sensor technology. This virtual test field can be used for analyses and simulation applications that support the derivation of measures for reality. The Chair of Geoinformatics is particularly involved in developing the cloud architecture, implementing "what-if" scenarios by cloning the digital twin, building a catalog service, and extending the data model for simulating sensor data streams. In addition, a spatial discussion platform for citizen participation is being investigated for societal dialogue.
SAVeNoW is structured into the following five work packages:
- GBTF: Social participation and accompanying questions
- VTF: Virtual test field
- DTF: Digital test field
- MSA: Model structuring and architecture
- SWM: Simulation and impact analysis of measures
Project Partners
- TUM Lehrstuhl für Verkehrstechnik
- 3D Mapping Solutions
- ASAP Engineering GmbH
- AUDI AG
- Conti-Temic Mircoelectronic GmbH
- THI Carissma
- Fraunhofer IVI
- Deutsches Zentrum für Luft- und Raumfahrt e.V., Institut für Verkehrssystemtechnik
- KU EI
- TWT
- SeppMed
- Universität Stuttgart