Forschungsschwerpunkte
Multi-Task-Lernen
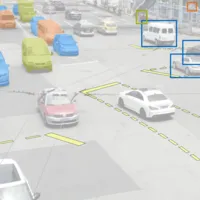
Viele Anwendungen, wie die Interpretation von Straßenräumen für das autonome Fahren, erfordern die Lösung verschiedener Aufgaben auf Grundlage digitaler Bilder. Die zu extrahierenden Informationen spiegeln dabei typischerweise verschiedene Aspekte identischer Objekte der physischen Welt wieder. Dieses Wissen um bestehende Korrelationen zwischen den Tasks kann ausgenutzt werden um die einzelnen Tasks effizienter und mit höherer Genauigkeit lösen zu können.


Hybride Modellierung
Die Kombination von maschinellem Lernen und physikalisch basierter Modellierung, die hybride Modellierung, soll mögliche Wege erforschen und weiterentwickeln, trotz des Black-Box-Charakters der verwendeten Modelle wissenschaftliche Erkenntnisse über die beobachteten Phänomene zu gewinnen und somit das Potenzial zeitlicher Deep-Learning-Ansätze für die Modellierung von Ökosystemprozessen nutzen zu können.

Monokulare Tiefenschätzung
Die Erstellung von Tiefenkarten ist essentiell für zahlreiche Anwendungen, wie z.B. autonomes Fahren oder Augmented Reality. Typischerweise werden diese aus Stereobild-Paaren oder mit Hilfe von aktiven Sensoren (wie z.B. LiDAR oder RGB-D Kameras) generiert. Angelehnt an die monokulare Tiefenwahrnehmung des Menschen, widmet sich dieses Projekt hingegen der Schätzung von Tiefenkarten aus Einzelbildern mittels künstlicher neuronaler Netze.