Second software implementation
The inter-comparison was performed not only on the final result, but also selected intermediate products, such as orbits, background models and corrections. After some software adaption on both sides, a very good agreement both for product-only and full-noise scenarios could be achieved, even though these two packages are based on different evaluation methods (short-arc approach at TUM vs. numerical integration approach at GFZ). As an example, Figure 1 shows the TUM and GFZ results for a 3d_H double pair scenario. In general, the RMS deviation between the two solutions is less than 5% of the resulting error level of the simulation. Also co-estimated daily (“Wiese”) parameters show a very similar performance.
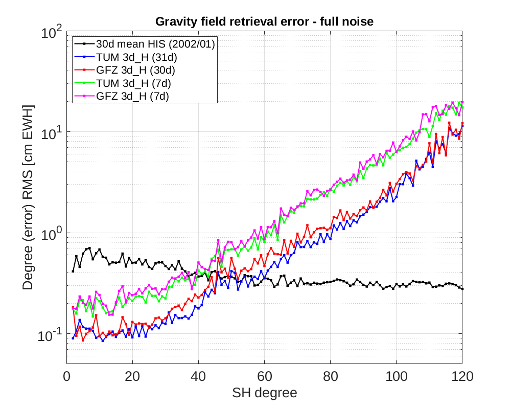
With this, two very comparable software systems are available for further simulation studies.