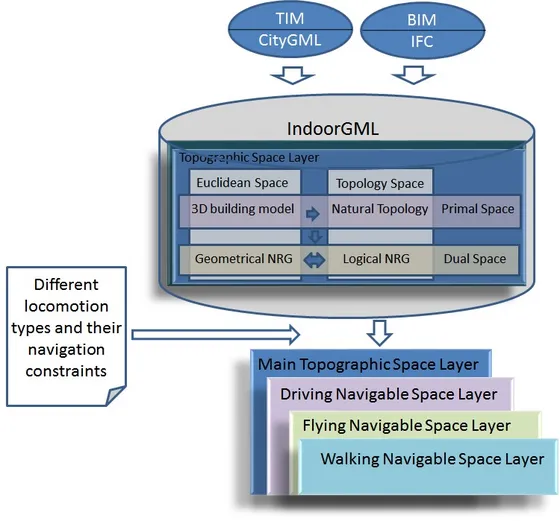
The purpose of this project is to support different types of locomotion for indoor navigation through determining safe navigable subspaces for each type of locomotion namely flying, walking, and driving using semantically enriched 3D building models. The subspaces are computed using geometrical-based method i.e., configuration space. The whole subspacing procedure is carried out in Multilayered Space-Event Model (MLSEM). MLSEM is a framework which is based on sound mathematical rules and provides application schema i.e., IndoorGML.
Projektbeschreibung
Indoor navigation is more complex as against the outdoor navigation. Because, indoor navigation has to deal with more dimensions (multiple floors of building), needs more level of detail to understand enclosing area around navigating subject or object, and has to consider the context of navigation for accurate subspacing results. Keeping in view the complexity of indoor navigation we have to find solutions for applications (e.g., route planning) of indoor navigation that must take into consideration of the context of navigation and be more level of detail to have accurate and consistent results for users.
In this research project, we consider different types of locomotion i.e., flying, walking, and driving with their unique navigating constraints. We address the problems with currently available methods to support different types of locomotion in indoor navigation and determine subspaces with precise results for each locomotion type using geometric based methods i.e., configuration space. The procedure of subspacing is carried out in Multilayered Space-Event Model (MLSEM) and uses semantically enriched 3D building model (e.g., CityGML and IFC) as static 3D indoor environment. The initial results of this project has shown that our procedure of subspacing determines accurate unique subspace for each locomotion type. This project will be helpful to support for the navigation of different types of locomotion in indoor environment and also will contribute towards standardization of indoor navigation.