Open Data
On this site you can find links to Open Data, created or modified at the Chair of Geoinformatics and provided for download.
Semantic 3D City Model of New York City
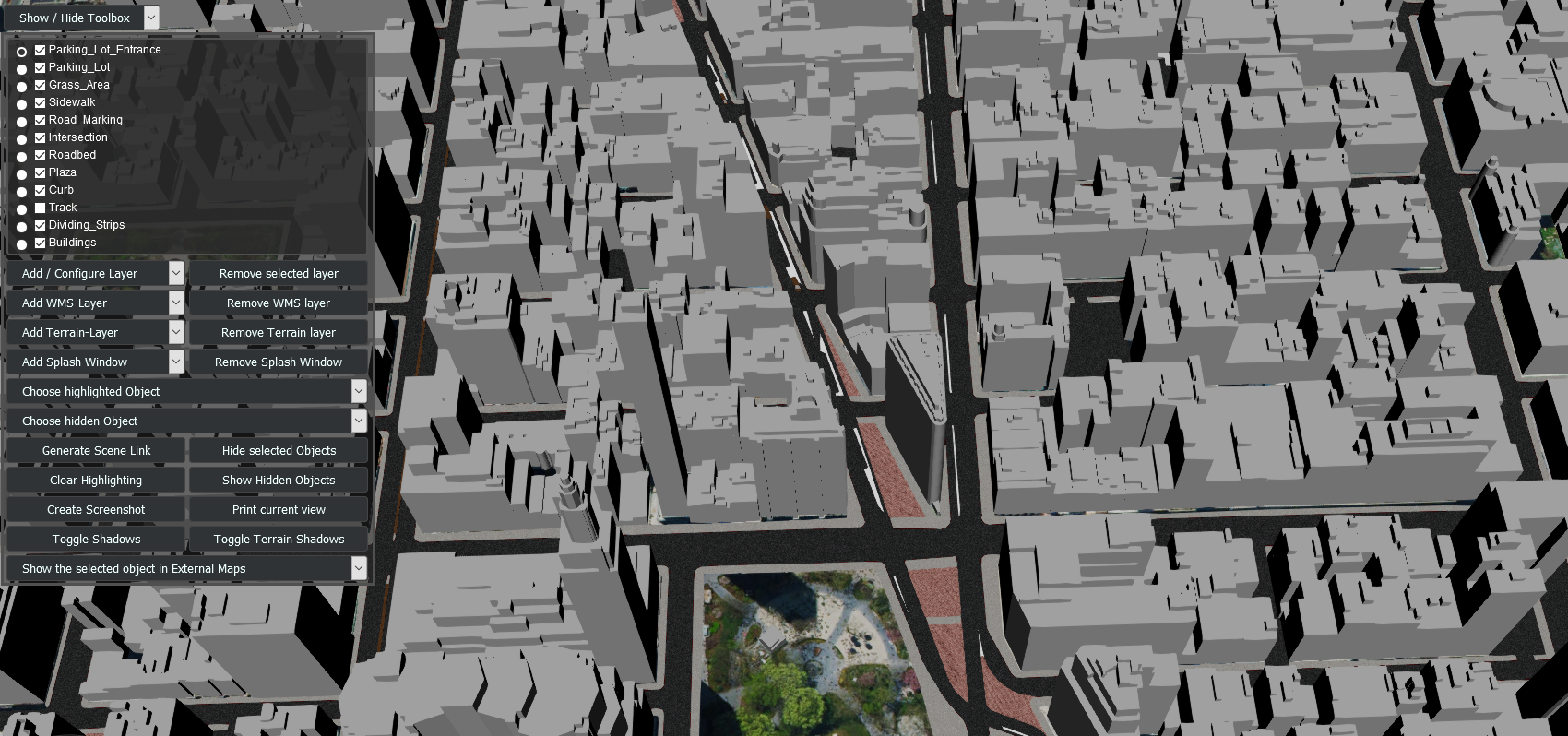
Find here data of a city and streetspace model of New York City for download. The model contains over 500.000 individual objects indlucing roadbeds, sidewalks, parking lots, plazas and many more. Find more information on the semantic 3D city model of NYC on the corresponding project page.
LOD3 Building Models in Ingolstadt

This CityGML dataset contains road space models (over 50 building models) in the area of Ingolstadt. To ensure the highest accuracy geometrically as well as semantically, the dataset was manually modeled based on the mobile laser scannings (MLS) provided by the company 3D Mapping Solutions GmbH (relative accuracy in the range of 1-3cm). Find more information on the corresponding GitHub-page.
TrueCity: Real and Simulated Urban Data for Cross-Domain 3D Scene Understanding

The TrueCity dataset comprises real-world measured and simulated point clouds of the same environment in Ingolstadt. The surveyed point clouds were provided by the company 3D Mapping Solutions GmbH and annotated within the TUM Data Innovation Lab as well as by Prabin Gyawali. In addition, the drive and the LiDAR sensor were resimulated using the driving simulator CARLA within a semantic model of the Ingolstadt environment. The benchmark dataset and the investigation of the effects of various real-synthetic mixing ratios on methods for semantic segmentation of point clouds were presented at the International Conference on 3D Vision 2026. The corresponding article is available via MediaTUM.
TUM2TWIN

As part of the TUM2TWIN Initiative, highly precise, georeferenced 3D representations of the TUM campus are being created and updated. These include point clouds, images, the road network in OpenDRIVE, as well as semantic 3D building and street space models in CityGML, all of which are provided as Open Data via the project website. The LOD3 building models can be accessed here, and the road network converted from OpenDRIVE is available here. A detailed description can be found in the TUM2TWIN article, which was published in the ISPRS Journal of Photogrammetry and Remote Sensing.